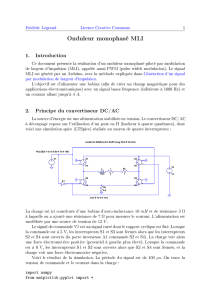
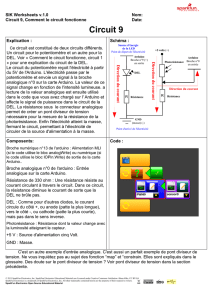
Mesures courant-tension de puissance

74LS04
Arduino
Vs
GND
GND
L6203
R1
0,2
GND GND
GND
15n
15n
220n
GND
10
22n
C5
2200u
GND
D1
D
GND
D2
D
GND
Dipole C
2200 uF
L
3.9 mH
GND
R
I
1O2
VCC
14
GND
7
IOREF
1
RESET
2
3.3 V
3
5 V
4
GND
5
GND
6
Vin
7
A0
8
A1
9
A2
10
A3
11
A4
12
A5
13
D0 RX 14
D1 TX 15
D2 16
D3 17
D4 18
D5 19
D6 20
D7 21
D8 22
D9 23
D10 24
D11 25
D12 26
D13 27
GND
28 AREF
29 SDA
30 SCL
31
IN 1
5
ENABLE
11
IN 2
7
SENSE
10
OUT 2 1
BOOT 2 8
OUT 1 3
BOOT 1 4
Vref
9
Vs
2
GND
6
Vs12 V
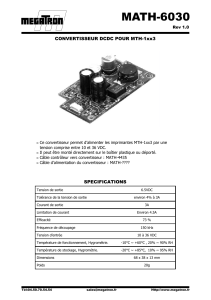
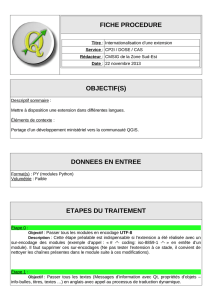
VcVs
R

U Ri
U
R2/R1*U
(1+R4/R3)RI
TL2372
R1
GND
R2
R1
R2
Arduino
GND
GND
TLV2372
GND
+5V
+5V
R3 R4
Dipole
R
GND
GND
GND
GND
I
I
OUT
Vc
+
3
-
2
O1
V+
8
V-
4
IOREF
1
RESET
2
3.3 V
3
5 V
4
GND
5
GND
6
Vin
7
A0
8
A1
9
A2
10
A3
11
A4
12
A5
13
D0 RX 14
D1 TX 15
D2 16
D3 17
D4 18
D5 19
D6 20
D7 21
D8 22
D9 23
D10 24
D11 25
D12 26
D13 27
GND
28 AREF
29 SDA
30 SCL
31
+
5
-
6
O7
V+
8
V-
4
5V
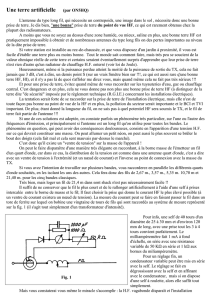
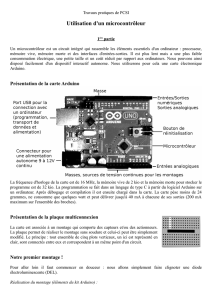
V0=R2
R1
U
R2/R1
[0,5] V
V1=1 + R4
R3RI
R4/R3
[0,5] V
R1= 18 kΩR2= 47 kΩ
R3= 10 kΩR4= 47 kΩR= 1 Ω
12 V
850 mA
4A R4/R3
Vs
R2/R1



 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%