(EN)

Seagull :
Le contrôle intelligent de moteurs électriques
Seagull est un circuit électronique développé pour le contrôle de
moteurs électriques DC et BLDC d’une puissance comprise entre
1W et 250W. Ce circuit intègre un puissant processeur ARM, un
étage de puissance, deux bus de communication, des interfaces
compatibles avec les différents standards de capteurs de position
disponible sur le marché ainsi qu’un nombre d’entrées et de sorties
analogiques et digitales.
Grace au rmware développé par KOORD Sàrl, Seagull dispose d’une
large palette de fonctionnalités lui permettant de s’intégrer directement
dans les systèmes les plus variés. Dans les applications simples, les
unités peuvent opérer comme contrôleurs d’axes et fonctionner de manière
autonome (Stand-Alone) grâce aux données mémorisées dans la mémoire
Flash. Pour les systèmes nécessitant un “Host”, Seagull opère comme un
esclave intelligent exécutant les commandes reçues via le bus RS-232 ou CAN.
En utilisant le logiciel d’interface, disponible gratuitement avec la carte Seagull, la mise
en place d’un système de positionnement est extrêmement simple et ne demande
de connaissances spéciques ni en électronique ni en langages de programmation.
Caractéristiques principales
Tension d’alimentation logique 5V à 24V
Tension d’alimentation puissance 6V à 36V
Puissance de sortie 150W (continu), 250W (pic, < 1s)
Courant 6A (continu), 10A (pic, < 1s)
Bus de communication RS-232, CAN
Température d’opération -10°C à 45°C
Température de stockage -40°C à 85°C
Humidité 20% à 80%
Caractéristiques de régulation
Fréquence PWM 1kHz à 25kHz
Duty-cycle (moteurs DC) 0% à 100%
Duty-cycle (moteurs BLDC) 0% à 97%
Vitesse maximale 25000rpm (1 paire de pôles)
Caractéristiques de positionnement
Capteurs Hall 3 entrées Hall
Encodeur quadratique (QEI) 3 entrées (A, B et index)
Capteur APS (PWM) Frequence : 1kHz à 20kHz
Duty-cycle : 1% à 99% (programmable)
Résolution (fréquence et duty-cycle) : 10bit
Capteur APS (SENT) Selon norme SAEJ2716
Capteur APS (Analogique) Plage de mesure : 0V à 5V (programmable)
Résolution : 0.1V
Vitesse d’acquisition : 1kHz à 10 kHz
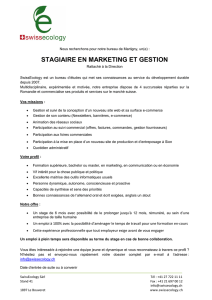
Alimentation de
puissance avec
protections intégrées
Alimentation
de puissance
Alimentation
logique
Sortie
haut-courant
RS 232
CAN
Alimentation
logique avec
protections intégrées
Sortie
de puissance
Interface
de communication
Driver Pont triphasé
avec capteur
de courant
Entrées
encodeur
Entrées
capteurs de Hall
Alimentations
capteurs
Phases
moteur
Encodeur
incrémental
Capteur
de Hall
Sortie 5V
Sortie 3.3V
Interface E/S
digitales
Interface E/S
Analogique
Entrées digitales
Entrées analogiques
Sorties analogiques
Entrée signal PWM
Coeur de
régulation
Mesure de tension
et de courant

87.5
28.8
44
4x
3
69
4
4.7
19.7
B
C
D
1
2
A
3
2
1
4
B
A
5
6
DRAWN
CHK'D
APPV'D
MFG
Q.A
KOORD Sàrl
FINISH:
DEBUR AND
BREAK SHARP
EDGES
NAME
SIGNATURE
DATE
MATERIAL:
DO NOT SCALE DRAWING
REVISION
TITLE:
DWG NO.
SCALE:1:1
SHEET 1 OF 1
A4
C
PCB+components
Data without tolerances are for
information only and not guaranteed
WEIGHT:
K.B.
-
Aug.2012
© 2012 Koord Sàrl. All rights reserved.
3D_Seagull
Mechanical draft
Fonctionnement
La grande palette de modes de fonctionnements donne à la carte Seagull une exibilité dans une variété de domaines de pilotage
de moteurs, d’automation et de mécatronique.
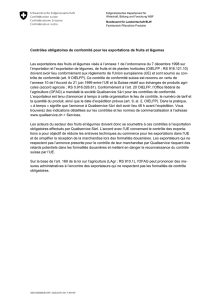
Dimensions
de créer rapidement et simplement des cycles de mouvement
en fonction des caractéristiques suivantes :
• Position/temps
• Vitesse/temps
• PWM/temps
Stockage “off-line”
La carte électronique Seagull est capable de mémoriser plusieurs
paramètres système (position, vitesse, tension, codes erreur, ...)
sur plusieurs cycles de régulation. Il est ainsi possible d’effectuer
une analyse à posteriori des variables de régulation ou du
système général.
Bootloader
Un bootloader est intégré dans la carte électronique et permet
à Koord Sàrl de fournir des mises à jour de son rmware
directement à ses clients. A l’aide du software d’interface, le
bootloader transfère via le bus sériel la mise à jour du rmware
sous forme binaire.
CAD les (STEP and IGES) are available.
Données mécaniques
Dimensions 87.5 x 69 x 19.7 mm
Fixations 4 x M2.5
Mode « Master-Slave » :
La communication avec un ordinateur central est basée sur
un protocole robuste de transmission via un bus série ou
CAN. Les buffers internes de la carte ainsi que la vérication
de chaque paquet de data transmis assurent une transmission
rapide et robuste des commandes. Une bibliothèque avec
plus de 60 commandes permet de contrôler une large gamme
de moteurs ainsi que de gérer toutes les fonctions auxiliaires
implémentées dans la carte Seagull.
Les principaux modes de contrôle disponibles dans la carte
Seagull sont :
• Contrôle de position
• Contrôle de vitesse
• Contrôle de couple
Mode « Stand-Alone » :
La carte électronique peut travailler de manière indépendante
pour contrôler un mouvement selon un prol prédéni. Grace
au software disponible gratuitement avec la carte, il est possible
002/fra
Caractéristiques E/S analogiques
Nombre d'entrées 3
Nombre de sorties 4
Plage d’opération 0V à 10V
Courant de sortie max 20mA
Vitesse d’acquisition 10kHz
Résolution 10bit
Caractéristiques E/S digitales
Nombre d'entrées 3
Type d’entrée TTL
Nombre de sorties (puissance) 2
Courant de sortie max 2A
Nombre de sorties (bas courant) 2 non-programmables (1x 5V et 1x 3.3V)
Courant de sortie max 80mA
Info commande
Les ingénieurs de l’entreprise Koord Sàrl sont à votre disposition
pour tout renseignement et pourront vous conseiller dans vos
développements d’automatisation. Sur demande, Koord Sàrl
peut également créer des prols de régulation spéciques de
plus grande complexité ainsi qu’apporter des modications à
l’électronique pour adapter le produit à toute application.
Pour toute information supplémentaire veuillez nous contacter
1
/
2
100%