Systèmes numériques de contrôle- commande pour la

Systèmes(numériques(de(contrôle-
commande(pour(la(mécatronique
INSA%Strasbourg%spécialité%Mécatronique
Informatique%Industrielle
Laurent%Barbé,%Laboratoire%ICube
Informatique%Industrielle 1

•Laurent%Barbé,%ingénieur%de%recherche%au%Laboratoire%ICube.%Ingénieur%en%
conception%du%contrôle-commande%pour%les%systèmes%robotiques
•4%séances%Cours/TD%(1h30)%:%7/10,%14/10,%21/10%et%4/11
•5%séances%Suivi%Projet%(3h)%:%
•2%groupes%:
•Groupe%1%:%étudiants%master%14/11%28/11%05/12%12/12%(M%et%AM)
•Groupe%2%:%étudiants%non%master%16/11%30/11%07/12%(M%et%AM)%14/12
•Prérequis%:%
•Notions%de%base%en%robotique%:%MGD,%MGI,%MCD
•Utilisateur%LabView%et%outils%National%Instrument%
•Programmation%en%C
•Notions%de%logique%combinatoire
•Base%en%automatique%et%synthèse%de%correcteur
Avant-propos
Informatique%Industrielle 2

•Comprendre%les%concepts%de%base%de%l’informatique%industrielle
•Architecture%matérielle
•Bus%de%communication
•Interaction%avec%les%périphériques
•Utilisation%dans%le%cadre%d’un%système%mécatronique%simple%
•Contrôle/commande%sur%un%système%poly%articulé
•Implémentation%de%loi%de%commande%
•Commande%%des%systèmes%robotiques
Objectifs
Informatique%Industrielle 3

1. Evolution%des%besoins%dans%l’industrie
2. Présentation%des%systèmes%numériques%de%contrôle-commande
3. Les%systèmes%informatiques%temps-réel
4. Chaîne%de%contrôle%d’un%système%robotique
5. Mise%en%œuvre%sur%un%exemple%et%présentation%du%projet
Plan
Informatique%Industrielle 4

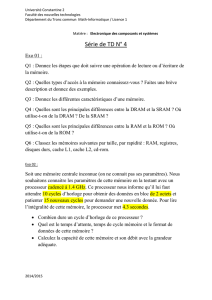
L’informatique%dans%l’évolution%industrielle
Informatique%Industrielle 5
1ière 2nd 3ième 4ième
Mécanisation
Machine%à%vapeur,%
Energie%hydraulique%et%
fossile
Electrification
Production%en%masse,
Energie%Electrique
Ligne%d’assemblage
Automatisation
Robotique,%
Electronique,%Automate
Cyber%Systèmes
Internet%Industriel,
Réseaux,%Production%
personnalisée
1800 1900 2000 2016
DEGRE5DE5COMPLEXITE5ET5D’INTEGRATION
Informatique%%%%%%%%%%%%%%%%%%%%Automatique%%%%%%%%% Internet%
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%