Lab6

18-10-14
1
GPA-668 : Capteurs et actionneurs
Détecteurs de proximité
Inductifs
Capacitifs
Optiques
Ultrasoniques
Note de cours GPA668
Robustes et fiables;
Ne détectent que les métaux;
Portée variant de 25 μm à 60 mm;
Sensibles aux champs magnétiques.
Détectent tous les matériaux;
Très sensible pour la détection;
Très sensible à l'environnement;
Température, humidité.
Portée de quelques centimètres.
Détectent tous matériaux;
Peuvent avoir de très longues portés;
Sujet à certains problèmes en présence de:
Poussières, chocs, radiations, ...
Note de cours GPA668
Note de cours GPA668
permettent la détection d’un objet, indépendamment
de la matière qui le compose, sa couleur, et sa
transparence.
relativement robuste et fiable
Note de cours GPA668

18-10-14
2
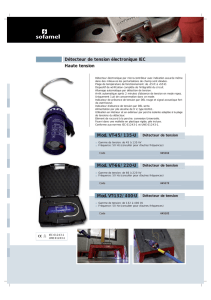
Ce détecteur comporte un circuit oscillateur qui envoie une tension alternative
dans une bobine localisée au bout du capteur). Un champ magnétique alternatif
est émis au bout du capteur. Si un objet métallique se présente dans ce champ
magnétique, il y aura apparition d’un courant. Le courant de Foucault qui
apparaît dans l’objet métallique prélève de l’énergie au circuit oscillateur.
L’amplitude et la fréquence de l’oscillateur change lorsqu’un objet est présent.
Plus l’objet est près, plus l’amplitude diminue
À partir de la réponse de l’oscillateur, une tension de sortie est obtenue via
l’électronique de détection .
Principes
n mat. assage
D P 0,9 0,9 F P .
Tolérance de fabrication 10%
Tolérance de température 10%
Facteur du métal
Passage de la cible:
Axial=100%
Radial=50%

18-10-14
3
Chez Thalie inc., il faut détecter un objet en cuivre passant a moins
de 4 mm selon une présentation axiale. Le détecteur de proximité
inductif doit envoyer un signal logique a la charge si la distance est
de 4 mm ou moins. La sortie de ce détecteur doit être de type NPN.
La température de l'emplacement ou se situe le capteur varie de
10oC a 40oC.
a- Parmi la liste des détecteurs données en annexe A, le ou lesquels peuvent faire
l'affaire. Indiquer le numéro de modèle, ainsi que leur portée nominale et réelle.
b- Quelle est la dimension minimum de la cible nécessaire pour que la détection ait
lieu a la distance demandée ?
c- Pour une source de tension continue de 24 Volts, quelle est la plage de résistance de
charge qui assure de ne pas faire circuler un courant trop grand dans le capteur ?
Indice : Voir "Control output (switching capacity)" et "Residual voltage".
d- Quelle est la tension aux bornes de la charge lorsque le détecteur est active par la
présence d'une cible ?
n mat. assage
D P 0,9 0,9 F P .
Il faut que la portée du détecteur soit supérieur à D=4mm
n
4 P 0,9 0,9 0.3 1
n
4 P 0.243
n4
P 16.4609
0.243
mm

18-10-14
4
b- Quelle est la dimension minimum de la cible nécessaire pour que la détection
ait lieu a la distance demandée ?
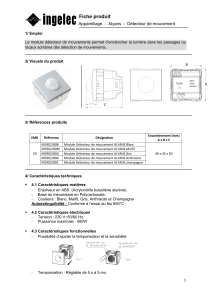
La portée dépend de la taille de la cible:
Épaisseur de la cible > 1mm
Dimensions de la cible doit être la plus grande de ces deux valeurs:
Diamètre du détecteur VS 3 fois la portée nominale
D
L
E
P
L ≥ D si D>3P
L ≥ 3P si 3P>D
3P=3x20mm=60mm
L
D=47mm L ≥ 60 mm
c- Pour une source de tension continue de 24 Volts, quelle est la plage de résistance de charge
qui assure de ne pas faire circuler un courant trop grand dans le capteur ?
Indice : Voir "Control output (switching capacity)" et "Residual voltage".
Ri
RC
Vcc
I
Courant maximal de sortie = 200mA
Chute de tension au capteur= 1.8V
0.2 0.2
chutte
CC
Vcc V
Vcc
Il fautque A ou A
Ri R R
24 1.8 22.2
0.2 111
0.2
C
C
AR
R
d- Quelle est la tension aux bornes de la charge lorsque le détecteur est active par la
présence d'une cible ?
24 1.8 22.2
chute
Uc Vcc V V V V
Uc

18-10-14
5
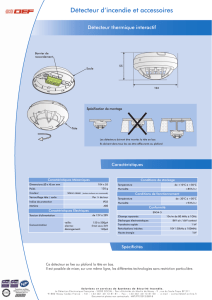
Le détecteur de proximité capacitif détecte tout objet qui a un effet sur un
champ électrique. Donc, le détecteur de proximité capacitif détectera les
objets, dont la constante diélectrique relative est suffisamment différente de
celle de l’air et les objets métalliques qui viennent modifier la géométrie du
champ électrique.
Lorsqu’une cible s’approche de la face sensible, sa
présence affecte l’intensité du champ électrique et la
capacitance du condensateur formé par les plaques
du détecteur
Principe
Dans le cas d’un objet non‐métallique, la principale voie de détection est via
le changement de la constante diélectrique du milieu présent dans le champ
électrique du condensateur
dA
C
td A
C
Détecteur capacitif
Soit un détecteur de proximité capacitif AC dont la capacitance évolue selon
l’équation suivante qui est valide si x ≤ 3 cm :
où, x est la distance entre la cible et la face du détecteur en cm, εp est le facteur de
correction du matériau de la cible, εr est le facteur de correction pour l’air (appelé
aussi la constante diélectrique relative de l’air) qui est de 1.000264 et A est la surface
de la capacitance du détecteur.
3
8,85 3 0,1
pr
cm x x
pF
CA
m cm x cm
Le détecteur a une surface de capacitance A de 3 cm2 et la cible se présente de façon
axiale.
a- Quelles sont les valeurs extrêmes de la capacitance pour une cible en résine de
mélamine ayant un facteur de correction de 10 ?
b- Quelle est la valeur de la capacitance si la cible en résine de mélamine à 1.5 cm ?
c- En utilisant une cible en porcelaine (facteur de correction de 5), à quelle distance
sera‐t‐elle détectée pour un seuil de capacitance égal à la valeur de la capacitance
calculée en b) ?
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%