CMMO-ST-C5-1-DIOP/DION

CMMO-ST-C5-1-DIOP/DION
Festo AG & Co. KG
Postfach
73726 Esslingen
Allemagne
+49 711 347-0
www.festo.com
Description sommaire 8039043
1506NH
[8039047]
Version originale : de
Contrôleur de moteur CMMO-ST Français.................................
Traduction de la notice originale
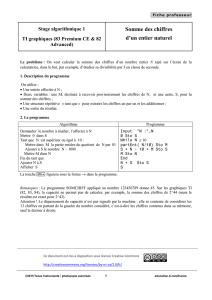
La documentation complète relative au contrôleur de moteur CMMO-ST
est disponible via le portail d'assistance è www.festo.com/sp.
La présente description sommaire est exclusivement destinée à une première
information. La description complète du contrôleur de moteur
CMMO-ST-C5-1-DIOP/DION comprend les documents suivants :
Désignation Table des matières
Description sommaire
CMMO-ST-...1)
Description sommaire de l'appareil et des fonctions du contrôleur
de moteur comme première information
Manuel
GDCP-CMMO-ST-EA-SY-...2)
Description de l'appareil et des fonctions du contrôleur de moteur
pour toutes les variantes du produit
– Montage
– Mise en service via le serveur Web / Festo Configuration Tool (FCT)
– Communication via l'interface I/O
– Caractéristiques techniques
Système d'aide du
logiciel FCT2)
Manuels du Festo Configuration Tool (FCT) pour la mise en service
et le paramétrage :
– de combinaisons configurables d'axes et de moteurs
– des systèmes de positionnement de la gamme Optimised Motion
Series (OMS) de Festo
Description
GDCP-CMMO-ST-EA-S1-...2)
Utilisation de la fonction de sécurité STO (“Safe Torque Off”)
Listes des paramètres2) Liste des paramètres par défaut des fichiers de paramètres pour les
systèmes de positionnement de la gamme Optimised Motion Series
(OMS) de Festo
Documentation spéciale
CMMO-ST_SPUL1)
Exigences pour le fonctionnement du produit aux États-Unis et au
Canada conformes à la certification Underwriters Laboratories Inc.
(UL).
1) La documentation est disponible en version imprimée.
2) La documentation est fournie sur le CD-ROM joint.
Fig. 1 Documentations du CMMO-ST
1 Sécurité
Respecter impérativement les instructions de sécurité et les avertissements
dans les documentations du contrôleur de moteur et dans les documentations
des autres composants utilisés.
Avant de procéder aux travaux de montage et d'installation, couper les tensions
d'alimentation. Les sécuriser contre une remise en marche accidentelle. Ne
rétablir les tensions d'alimentation électriques qu'une fois les travaux de
montage et d'installation entièrement achevés.
Ne jamais retirer ou brancher le connecteur si le produit est sous tension.
Respecter les consignes concernant la manipulation des composants sensibles
aux charges électrostatiques.
Activer le régulateur uniquement lorsque l'actionneur est correctement installé
et complètement paramétré.
N'effectuer aucune réparation sur le contrôleur de moteur. En cas de défaut :
remplacer l'ensemble du contrôleur de moteur.
Avertissement
Blessures graves ou destruction des composants dues à des collisions.
S'assurer qu'aucun objet ne se trouve dans la zone de déplacement, tant que
le système est connecté à des sources d'énergie.
S'assurer que personne ne se trouve dans la zone d’influence des actionneurs
connectés ou ne puisse y introduire les mains
Sécuriser la zone de danger en prenant des mesures de protection adaptées,
par ex. des séparations de protection ou des avertissements.
Attention
Blessures corporelles et dommages matériels.
Chute de charges en cas de coupure de courant ou de désactivation de l'alimen
tation en énergie de l'actionneur en position inclinée ou verticale.
Sécuriser les charges au moyen de mesures de sécurité externes (par ex.
cliquets de retenue ou boulons mobiles).
Attention
Températures élevées des surfaces du boîtier.
Tout contact avec ces surfaces peut provoquer l'affolement, ainsi que des ré
actions incontrôlées susceptibles de causer des dommages consécutifs.
Protéger le produit contre tout contact accidentel.
Signaler les dangers potentiels pour le personnel opérateur et de mainte
nance.
Avant tout contact, par ex. pour le montage ou l'installation : laisser refroidir
le contrôleur de moteur jusqu'à la température ambiante.
1.1 Usage normal du CMMO-ST
Conformément à son usage normal, le contrôleur de moteur CMMO-ST est utilisé
pour la commande des actionneurs suivants avec des moteurs pas à pas biphasés
de Festo :
– Systèmes de positionnement de la gamme Optimised Motion Series (OMS) avec
unités moteurs-axe de Festo
– Actionneurs configurés (rotatif/linéaire) :
– Axes de Festo, par ex. EGC, DNCE, DGE
– Axes définis par l'utilisateur
Respecter les normes indiquées ainsi que les prescriptions des organismes
professionnels, de l'Association de contrôle technique (TÜV), les dispositions
VDE et les dispositions nationales applicables.
Respecter les valeurs limites de tous les composants supplémentaires (par ex.
capteurs, actionneurs).
Le CMMO-ST doit uniquement être utilisé comme suit :
– dans un état fonctionnel irréprochable
– dans son état d'origine sans y apporter de modifications non autorisées
– dans les limites définies par les caractéristiques techniques du produit
– dans la durée de vie spécifiée des éléments de commutation pour la fonction de
sécurité
– comme appareil à encastrer dans un coffret de commande
L'utilisation en dehors du coffret de commande est possible si tous les connec
teurs mâles et les interfaces non utilisées sont obturés avec des capuchons de
protection.
1.2 Usage normal de la fonction STO
La fonction STO, ou “suppression sûre du couple” (“Safe Torque Off”), selon
EN61800-5-2 est destinée, conformément à son usage normal, à la désactivation
du couple d'un moteur connecté à un CMMO-ST. La fonction STO empêche le
démarrage accidentel du moteur connecté. La fonction STO doit uniquement être
utilisée pour les applications pour lesquelles les valeurs caractéristiques de
sécurité indiquées sont suffisantes.
Valeurs caractéristiques de sécurité
La fonction STO du CMMO-ST répond aux exigences pour les valeurs caractéristiq
ues de sécurité suivantes :
– PLe/cat.3 selon ENISO13849-1
– SIL 3 selon EN61800-5-2
– SILCL3 selon EN62061
Le niveau de sécurité pouvant être atteint dépend des autres composants utilisés
pour la mise en œuvre de la fonction de sécurité.
Pour assurer la protection contre un démarrage accidentel, la commande du
contrôleur de moteur doit être effectuée via la connexion [X3] avec la catégorie
requise pour l'application selon EN ISO 13849-1, par ex. via un interrupteur de
sécurité externe.
Qualification du personnel technique (exigences imposées au personnel)
Ce produit doit impérativement être mis en service par une personne qualifiée
dans le domaine de l'électrotechnique et familiarisée avec :
– l'installation et l'exploitation de systèmes de commande électriques
– les prescriptions en vigueur relatives au fonctionnement des installations de
sécurité
– les prescriptions en vigueur en matière de prévention des accidents et de sécu
rité au travail
– la documentation relative à ce produit
Niveau de couverture du diagnostic (DC) pour la fonction de sécurité
Le niveau de couverture du diagnostic dépend de l'intégration du contrôleur de
moteur dans la chaîne de commande ainsi que des mesures appliquées pour le
diagnostic.
Des mesures appropriées de maintien du niveau de sécurité doivent être prévues
dans le cas où une anomalie potentiellement dangereuse est décelée lors du diag
nostic.

Nota
Le contrôleur de moteur ne peut pas détecter de lui-même un court-circuit
transversal dans le circuit d'entrée.
Si nécessaire, utiliser un interrupteur de sécurité avec détection des courts-
circuits transversaux.
1.3 Mauvais usage prévisible pour la fonction STO
Les mauvais usages prévisibles suivants figurent parmi les utilisations différant de
l'usage normal :
– le pontage de la fonction STO
– l'utilisation dans des applications dont la désactivation peut entraîner des mou
vements ou états dangereux.
Nota
La fonction STO n'est pas une fonction de sécurité suffisante dans le cas
d'actionneurs soumis à un couple permanent ou une force (par ex. charges
suspendues, axes verticaux).
La fonction STO ne protège pas contre une électrocution, mais
uniquement contre des mouvements dangereux !
2 Prérequis à l'utilisation du produit
Mettre à la disposition des personnes suivantes la documentation complète du
produit :
– le constructeur ou le monteur de la machine ou de l'installation
– le personnel chargé de la mise en service
Conserver la présente documentation pendant tout le cycle de vie du produit.
S'assurer que les prescriptions figurant dans la présente documentation sont
respectées. Respecter également les documentations relatives aux autres
composants et modules (par ex. le contrôleur de moteur, les câbles, etc.).
Tenir compte de toutes les réglementations légales en vigueur pour le lieu de
destination ainsi que des documents suivants :
– les prescriptions et les normes
– les réglementations des organismes de contrôle et des assurances
– les dispositions nationales en vigueur.
Pour une utilisation conforme et sûre de la fonction STO :
Analyser les risques pour votre machine.
Respecter les valeurs caractéristiques de sécurité spécifiques (èChapitre 7,
Caractéristiques techniques).
Domaine d'application et certifications
Le contrôleur de moteur avec fonction de sécurité intégrée STO est un composant
de sécurité des commandes. D'ailleurs, ce contrôleur de moteur porte un mar
quage CE. Certaines configurations du produit possèdent une certification
d'Underwriters Laboratories Inc. (UL).
Les certificats et la déclaration de conformité de ce produit sont
disponibles sur Internet à l'adresse : è www.festo.com/sp
Normes indiquées
Version
ENISO13849-1:2008-06/AC:2009-03
EN 61800-5-2:2007-10
EN62061:2005-04
Fig. 2 Normes indiquées dans la documentation
2.1 Conditions de transport et de stockage
Lors du transport et du stockage, protéger le produit contre des sollicitations
non autorisées telles que :
– les contraintes mécaniques
– les températures non autorisées
– l'humidité
– les atmosphères agressives.
Stocker et transporter le produit dans son emballage d'origine. L'emballage
d'origine offre une protection suffisante contre les sollicitations habituelles.
2.2 Prérequis techniques
Pour une utilisation conforme et sûre du produit :
Procéder à une analyse du risque de la machine ou de l'installation.
Respecter les valeurs caractéristiques spécifiques èChapitre 7
Respecter les conditions de raccordement et les conditions environnementales
de tous les composants raccordés èChapitre 7. Seul le respect des valeurs
limites ou des limites de charge permet un fonctionnement du produit con
forme aux directives de sécurité en vigueur.
3 Description du produit
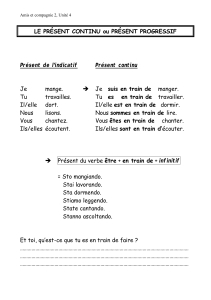
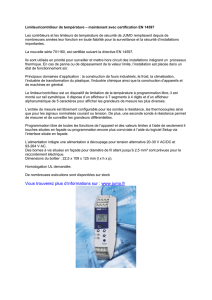
3.1 Vue d’ensemble du produit
1[X9] tension de charge/logique
2[X1] interface I/O pour la
commande avec API/PCI
3Vue de devant avec afficheur à
7 segments
4[X18] interface de paramétrage
Ethernet RJ-45
5[X1A] capteur de référence
6[X3] STO
7[X2] codeur RS422
8[X6] moteur
9Terre fonctionnelle
aJ Surface pour le montage sur la face
arrière
aA Surface pour le montage latéral
1
2
3
4
56 7 8 9
aA aJ
Fig. 3 Composants du CMMO-ST
3.2 Fourniture
Nombre Composant
1Contrôleur de moteur CMMO-ST
1Paquet opérateur
– Description sommaire
– CD-ROM contenant :
– le logiciel de paramétrage “Festo Configuration Tool” (FCT)
– les documentations relatives au produit
– les listes de paramètres pour les systèmes de positionnement pris en charge
1Assortiment de connecteurs NEKM-C-10 comprenant 5 connecteurs pour le moteur, le
codeur, l'alimentation électrique, le capteur de référence et les signaux de
commutation de la fonction STO
1Étrier de rail
Fig. 4 Fourniture
4 Montage
Attention
Mouvements inattendus et accidentels de l'actionneur lors des travaux de mon
tage, d'installation et de maintenance.
Avant de procéder aux travaux : couper les alimentations en énergie.
Sécuriser les alimentations en énergie contre une remise en marche acciden
telle.
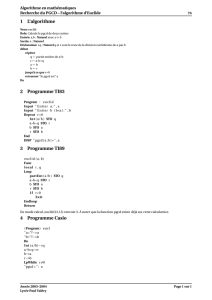
4.1 Montage du contrôleur
Le montage peut être effectué sur un rail DIN ou sur une surface plane.
5mm max.
41mm
61,35mm
Fig. 5 Montage sur rail DIN
Monter le CMMO-ST sur le rail DIN comme suit :
1. Accrocher le CMMO-ST par le haut dans le rail DIN en utilisant le crochet de
l'étrier du rail.
2. Appuyer sur le bas du rail DIN jusqu'à ce que le CMMO-ST s'enclenche.
Monter le CMMO-ST sur une surface plane comme suit :
1Retirer l'étrier du rail
2Surface de fixation
sur la face arrière
3Évidements (3x) pour
le montage sur la
face arrière
4Surface de fixation
latérale
5Évidements (4x) pour
le montage latéral
3
4
5
1
2
Fig. 6 Montage sur la surface de fixation latérale ou arrière

5 Installation électrique
Attention
Mouvements inattendus et accidentels de l'actionneur lors des travaux de mon
tage, d'installation et de maintenance.
Avant de procéder aux travaux : couper les alimentations en énergie. La supp
ression du signal de validation du contrôleur ne suffit pas.
Sécuriser les alimentations en énergie contre une remise en marche acciden
telle.
5.1 Connexions et câbles
Attention
Mouvements inattendus et accidentels de l'actionneur dus à une confection
erronée des câbles.
Utiliser exclusivement les connecteurs mâles fournis et de préférence les
câbles figurant dans les accessoires indiqués èwww.festo.com/catalogue.
Poser tous les câbles mobiles sans les plier et sans exercer de contrainte
mécanique, si nécessaire utiliser une chaîne porte-câbles. Respecter les
instructions relatives à l'axe et aux composants supplémentaires.
Protection contre l'électricité statique
Du fait des connecteurs mâles non affectés, il existe un danger de dom
mage dû aux décharges électrostatiques (ESD) sur l'appareil ou sur
d'autres parties de l'installation.
Respecter les consignes concernant la manipulation des composants
sensibles aux charges électrostatiques.
Obturer les connecteurs mâles non affectés à l'aide de capuchons de
protection.
Mettre les parties de l'installation à la terre avant l'installation.
Utiliser des équipements ESD adaptés (par ex. chaussures, bandes de
mise à la terre, etc.).
Les connecteurs mâles pour la connexion du contrôleur de moteur sont compris
dans la fourniture du contrôleur de moteur (assortiment de connecteurs NEKM-
C-10).
Autres accessoires :
Câble de commande vers la commande de niveau supérieur (interface I/O)
– Câble de commande
– Connecteur mâle Sub-D à 25 pôles
NEBC-S1G25-K-3.2-N-LE25
NEFC-S1G25-C2W25-S6
Connexion de l'interface I/O via un bloc de connexion
– Bloc de connexion
– Câble CMMO-ST/bloc de connexion
S1G25-C2W25-S7
NEBC-S1G25-K-...-N-S1G25
Câbles de moteur et de codeur
NEBM conforme à la configuration de l'actionneur dans différents modèles de
connecteur et différentes longueurs èwww.festo.com/catalogue
5.2 [X1] Interface I/O
La communication avec la commande de niveau supérieur (API/PCI) s'effectue via
l'interface I/O.
La logique de commutation des entrées et des sorties dépend de la variante de
l'interface du contrôleur :
– CMMO-ST-...-DIOP : logique positive PNP
– CMMO-ST-...-DION : logique négative NPN
Connexion
1
114 25
13
X1
Broche 1 2 … 11 12 13 ... 22 23 24 25
Entrée (I) Sortie (O) – LOGIC
OUT1)
GND
01 02 … 11 01 02 ... 11 – +24 V 0 V
1) Non protégée contre les surcharges ! 100 mA max. autorisé.
Fig. 7 Connexion [X1] interface I/O
5.3 [X1A] Capteur de référence
Connexion Broche Fonction
13
13
X1A
1+24 V
LOGIC
OUT
Sortie en tension pour l'alimentation du capteur de
référence.
Non protégée contre les surcharges ! 100 mA max.
autorisé.
2 SIGNAL
REF
CMMO-ST-...-DIOP :
– entrée pour contact PNP
– commute sur +24V
– exécution NO/NF
CMMO-ST-...-DION :
– entrée pour contact NPN
– commute sur GND
– exécution NO/NF
3 GND Potentiel de référence (masse)
Fig. 8 Connexion [X1A] capteur de référence
5.4 [X2] Codeur
Connexion Broche Fonction
X2
18
18
1A 1) Signal de codeur incrémentiel A+
2A/ 1) Signal de codeur incrémentiel A–
3 B 1) Signal de codeur incrémentiel B+
4 B/ 1) Signal de codeur incrémentiel B–
5N 1) Impulsion nulle du signal de codeur
incrémentiel N+
6N/ 1) Impulsion nulle du signal de codeur
incrémentiel N–
75 V
(± 10 %)
Alimentation du codeur.
Non protégée contre les surcharges !
100 mA max. autorisé.
80 V Potentiel de référence
1) resp. 5 V et Ri = env. 120 Ω
Fig. 9 Connexion [X2] codeur
5.5 [X3] STO
La fonction de sécurité STO (“Safe Torque Off”) est décrite de manière détaillée
dans le document GDCP-CMMO-ST-STO-…. La fonction STO doit être utilisée ex
clusivement sur le mode décrit dans ce document.
Recommandation lors de la première mise en service sans technique de sécurité :
– câblage minimal avec commande d'arrêt d'urgence
– coupure à deux canaux via les entrées de pilotage STO1 [X3.2] et STO2 [X3.3]
Connexion Broche Fonction
X3
15
15
1+24 V
LOGIC
OUT
Sortie de tension logique [X9]
Non protégée contre les surcharges ! 100 mA
max. autorisé.
2 STO1 Entrée de pilotage pour la fonction STO : canal 1
3 STO2 Entrée de pilotage pour la fonction STO : canal 2
4 DIAG1 Le contact d'accusé de réception est fermé (basse
impédance) lorsque la fonction STO est activée.
5 DIAG2
Fig. 10 Connexion [X3] STO
5.6 [X6] Moteur
Connexion Broche Fonction
X6
16
16
1Branche A Connexion des deux branches du moteur
2Branche A/
3Branche B
4Branche B/
5 BR+ Connexion du frein de maintien
Résistance aux courts-circuits et surcharges.
24 V, max. 1,4 A è 33 W. BR– = GND,
BR+ connecté (charge 24 V)
6 BR–
Fig. 11 Connexion [X6] moteur
5.7 [X9] Alimentation électrique
Avertissement
Électrocution
Dommages corporels, sur la machine et sur l'installation.
Pour l'alimentation électrique, utiliser exclusivement des circuits électriques
TBTP conformes à la norme CEI602041 (Très Basse Tension de Protection,
TBTP).
Respecter les exigences générales s'appliquant aux circuits électriques TBTP
de la norme CEI60204-1.
Utiliser exclusivement des sources de tension qui garantissent une isolation
électrique fiable de la tension de service et de la tension sous charge selon
CEI60204-1.
Connexion Broche Fonction
X9
51
51
1Ne pas raccorder !
2Ne pas raccorder !
3Alimentation de l'électronique de commande
(alimentation logique)
4Potentiel de référence (0 V) pour la tension sous
charge, la tension logique, la fonction STO et
l'interface de commande
5Alimentation de l'étage de sortie de puissance et
du moteur (alimentation sous charge)
Fig. 12 Connexion [X9] avec connecteur mâle (assortiment de connecteurs
NEKM-C-10)

5.8 [X18] Interface Ethernet
Nota
Les accès non autorisés à l'appareil peuvent provoquer des détériorations ou
des dysfonctionnements. Lors de la connexion de l'appareil à un réseau :
Protéger le réseau contre les accès non autorisés.
Exemples de mesures de protection du réseau :
– Pare-feu
– Intrusion Prevention System (IPS)
– Segmentation de réseau
– LAN virtuel (VLAN)
– Virtual Private Network (VPN)
– Sécurité au niveau de l'accès physique (Port Security).
Autres consignes è Directives et normes relatives à la sécurité dans la
technique de l'information, par ex. CEI 62443, ISO/CEI 27001.
Connexion Broche Fonction
X18
8
1
1 TD+ Données émises +
2 TD– Données émises –
3 RD+ Données reçues +
4 – non connectée
5 – non connectée
6 RD– Données reçues +
7 – non connectée
8 – non connectée
Fig. 13 Connexion [X18] interface Ethernet
6 Mise en service
Relier le CMMO-ST directement à l'ordinateur/au portable à l'aide du câble
Ethernet (connexion point-à-point).
Mise en service simplifiée pour les systèmes de positionnement (OMS) via le
serveur Web intégré avec site Internet de paramétrage et de diagnostic en
anglais (http://192.168.178.1)
Mise en service complète de combinaison moteur/axe configurées avec le FCT
(Festo Configuration Tool)
La mise en service complète du contrôleur de moteur est décrite dans le
manuel GDCP-CMMO-ST-EA-SY-… et dans l'aide en ligne du PlugIn
CMMO-ST du logiciel FCT.
7 Caractéristiques techniques
Indicateurs de sécurité et indications sur la sécurité
Fonction de sécurité STO Safe Torque Off
(suppression sûre du couple)
Catégorie 3 selon EN ISO 13849-1
Performance Level PLe selon EN ISO 13849-1
Safety Integrity Level SIL3 selonEN 61800-5-2
(niveau d'intégrité de sécurité)
SIL Claim Limit SILCL3 selonEN 62061
(limite de sollicitation du niveau d'intégrité de
sécurité)
DCavg [%] 90 Average Diagnostic Coverage
(niveau moyen de couverture du diagnostic)
MTTFd[années] 4 500 Mean Time To dangerous Failure
(temps moyen avant défaillance dangereuse)
HFT 1 Hardware Failure Tolerance
(tolérance de défaillances du matériel)
PFH [1/h] 1,3 x 10-10 Probability of dangerous Failure per Hour
(probabilité d'une défaillance dangereuse par
heure)
t
Proof Test Inter
val
[années] 20 Intervalle de contrôle
Durée d'utilisation [années] 20 selon EN ISO 13849-1
Essai de type La fonction STO a été certifiée par un organisme de contrôle
indépendant. Certificat CMMO-ST è www.festo.com/sp
Composant/fonction Adapté(e) pour l'utilisation dans les systèmes à partir de la
catégorie 1 de la norme EN ISO 138491
Fig. 14 Indicateurs de sécurité et indications sur la sécurité
Caractéristiques techniques générales
Alimentation électrique [VDC] 24 ± 15%
Protection contre l'électrocution Circuit TBTP (Très Basse Tension de Protection)
Courant tension sous charge
(broche 5)
[A] 5,7 Courant nominal
[A] 8 Courant de pointe
Courant alimentation logique
(broche 3)
[A] 0,3 Courant nominal (sans alimentation des sorties)
Alimentation des sorties de l'interface I/O :
0,1 A max. par sortie, soit jusqu'à 1,1 A.
Intensité absorbée totale max. [A] 9,4 en fonction de la structure du système
Caractéristiques techniques générales
Message de dysfonctionnement LED
Interface de paramétrage Interface Ethernet
Logiciel de paramétrage – Festo Configuration Tool (FCT)
– Serveurs Web
Interfaces de commande
I/O numériques
– Profil de soupape
– Profil binaire
– DIN1 … DIN4, DOUT1 … DOUT2
– DIN1 … DIN11, DOUT1 … DOUT11
Option : Ethernet – Commande via Ethernet (CVE)
Fonctions de protection – Surveillance I2t
– Surveillance de la température de la partie puissance
– Surveillance de courant
– Détection des pannes de courant
– Surveillance de la sous-tension
– Contrôle des erreurs de poursuite
– Identification logicielle des fins de course
Degré de protection IP40 (en cas d'affectation totale du connecteur)
Marquage CE (déclaration de
conformité è www.festo.com/sp)
selon la directive européenne relative à la CEM
2004/108/CE1)
selon la directive européenne relative aux
machines 2006/42/CE
Longueur de câble max. 30 m
Autres certifications UL/RCM Mark
Mode de fixation – Rail DIN
– Platine de montage
1) Le composant est destiné à être utilisé dans le domaine industriel.
Fig. 15 Caractéristiques techniques générales
8 Diagnostic
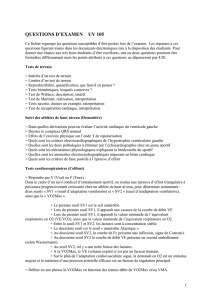
8.1 Afficheur à 7 segments
L'afficheur à 7 segments du CMMO-ST sig
nale le mode de fonctionnement actif, les
erreurs et les avertissements. Généra
lement, il s'agit de 4 caractères représen
tés l'un après l'autre et suivis d'un espace.
Les numéros des messages de diagnostic des catégories Erreur et Avertissement
ont un codage hexadécimal.
Pendant une mise à jour du firmware,
l'afficheur bascule entre les segments
verticaux et les segments horizontaux.
La fonction de signalement permet d'iden
tifier un contrôleur de moteur dans un ré
seau comprenant plusieurs contrôleurs de
moteur.
Le point clignote dans l'afficheur du cont
rôleur de moteur recherché ; en d'autres
termes, le contrôleur de moteur “signale
sa présence”.
1
1Point pour la fonction de
signalement
(identification dans le réseau)
Afficheur Mode de fonction
nement/
évènement
Priorité
B L E Erreur bootloader 1Erreur lors de la mise à jour du firmware.
Arrêter l'appareil puis le remettre sous
tension (reset).
Relancer le téléchargement du firmware.
Si les erreurs persistent, s'adresser au service
après-vente de Festo.
Exxx1) Erreur 2 Les messages d'erreur interrompent des
messages de priorité inférieure et doivent
être acquittés.
Axxx1) Avertissement 3 Les avertissements ont une priorité inférieure
à celle des erreurs et ne s'affichent pas s'ils
sont générés pendant l'affichage d'une
erreur. Dans le cas contraire, ils s'affichent
deux fois d'affilée. Les avertissements ne
doivent pas être confirmés (acquittés).
HHHH STO – Safe torque off 4La fonction STO a été demandée.
P000 Référencement 5 Fonctionnement normal
P070 Pas à pas positif
P071 Pas à pas négatif
P1xx2) Mode de positionnement
P2xx2) Mode servo
P3xx2) Mode vitesse
1) xxx =numéro de dysfonctionnement, hexadécimal
2) xx =numéro d'enregistrement, décimal
Fig. 16 Messages sur afficheur à 7 segments
1
/
4
100%