Un syst`eme tutoriel intelligent `a base de syst`eme immunitaire

Ecole Nationale d’Ingénieurs de Brest
Rapport de stage de Master Recherche en Informatique
Encadrant de stage : Pierre CHEVAILLIER
Un syst`
eme tutoriel intelligent `
a base de syst`
eme
immunitaire artificiel
Fr ´
ed ´
eric FAVRE ARTIGUES
Brest, le 2 Juin 2009

Sommaire
1 Avant propos 1
2 Introduction 1
3 Contexte 2
3.1 Mascaret...................................... 2
3.1.1 Généralités ................................ 2
3.1.2 Les méta-modèles VEHA et HAVE . . . . . . . . . . . . . . . . . . . 2
3.1.3 Le recueil des traces . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
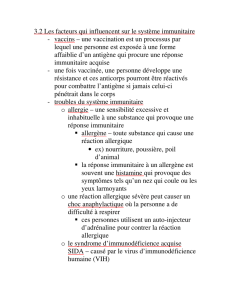
3.2 Les Systèmes Immunitaires Artificiels . . . . . . . . . . . . . . . . . . . . . . 4
3.2.1 La sélection négative . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2.2 La sélection clonale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2.3 Le réseau immunitaire . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.3 Les différents domaines d’application . . . . . . . . . . . . . . . . . . . . . . 8
4 La reconnaissance d’actions 9
4.1 Définition d’une action dans un EVAH . . . . . . . . . . . . . . . . . . . . . 10
4.1.1 L’utilisateur................................ 11
4.1.2 L’entité .................................. 11
4.1.3 Lemoment ................................ 14
4.1.4 Lalocalisation .............................. 14
4.1.5 L’utilisation................................ 15
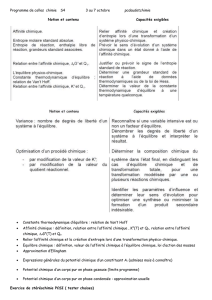
4.2 Lespréconditions................................. 15
4.3 L’affinité appliquée à la reconnaissance d’actions . . . . . . . . . . . . . . . 17
5 Mise en œuvre de l’AIS 19
5.1 Modèledel’AIS.................................. 19
5.1.1 Les propriétés des AIS pour la reconnaissance d’actions . . . . . . . 20
5.1.2 Diagramme de classes . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.1.3 Diagramme objets . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2 Résultats ..................................... 26
5.2.1 Casd’étude................................ 27
5.2.2 Résultats ................................. 29
5.3 Analysedesrésultats............................... 34
5.4 Application à l’implantologie . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6 Conclusion 38

Un système tutoriel intelligent à base de système immunitaire artificiel Juin 2009
1 Avant propos
Ce rapport s’inscrit dans le cadre d’un stage de Master Recherche Informatique au sein
de l’équipe AReVi (réalité virtuelle et augmentée) du LISyC (Laboratoire d’Informatique
des Systèmes Complexes). Ce stage a été réalisé au CERV (Centre Européen de Réalité
Virtuelle). Un des principaux axes de recherche du laboratoire est le développement d’en-
vironnements immersifs pour la formation. Ces environnements utilisent les techniques de
la réalité virtuelle et des systèmes de tuteurs autonomes. Ils sont plus couramment appelés
Environnements de réalité Virtuelle pour l’Apprentissage Humain (EVAH).
Ce stage s’intègre au projet MASCARET (Multi-Agent System for Collaborative Adapta-
tive and Realistic Environment for Training) dont l’objectif est de concevoir les modèles
nécessaires à la génération d’environnements de formation mettant l’apprenant dans une
situation d’apprentissage en agissant dans un environnement similaire au réel. L’objectif
de ce stage est de proposer un ITS dont le comportement des agents éducationnels est basé
sur les systèmes immunitaires artifiels.
2 Introduction
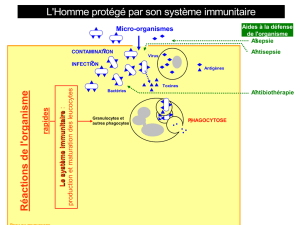
Les Environnements de réalité Virtuelle pour l’Apprentissage Humain ont comme
principal objectif d’exploiter les technologies de la réalité virtuelle pour favoriser l’appren-
tissage de compétences dans un environnement contrôlé. Les utilisateurs de ces systèmes
se trouvent immergés dans un monde virtuel dynamique dans lequel ils interagissent avec
l’environnement par le biais de périphériques. Les EVAH intègrent un système tuteur au-
tonome (ITS, Intelligent Tutoring System) destiné à suivre l’activité de l’apprenant et de
lui fournir, ainsi qu’au formateur, des assistances pédagogiques appropriées au contexte
courant. Pour réaliser le suivi du déroulement de l’activité, l’ITS doit avoir des connais-
sances sur le domaine de l’apprentissage, sur la démarche pédagogique et sur l’apprenant.
Pour que les assistances pédagogiques soient efficaces, l’ITS doit également tenir compte
de la représentation de ces connaissances et de la manière d’interagir avec l’utilisateur (cf
figure 1).
Fig. 1 – modèles composant un ITS (Buche et al., 2004).
Rapport de stage de master recherche - page 1 -

Un système tutoriel intelligent à base de système immunitaire artificiel Juin 2009
L’ITS doit, de plus, disposer d’un mécanisme de mémorisation et d’apprentissage des
interventions des agents pédagogiques. La réaction du système, à la suite d’une reconnais-
sance de l’action de l’utilisateur, doit être adaptative. Dans le cadre de ce stage, nous avons
exploré la piste des systèmes immunitaires artificiels 1car les propriétés de ces systèmes
semblent pouvoir s’appliquer à la problématique des ITS.
Dans la première partie, nous présentons les systèmes immunitaires artificiels, les
processus qui les composent et les différents domaines d’application. La seconde partie
de se rapport se consacre à la définition d’une action dans un EVAH. Puis la troisième,
à la présentation d’un modèle générique et son implémentation avec un système tutoriel
intelligent. Enfin ce rapport se conclue par un bilan de ces travaux et par les perspectives
envisageables pour une tel système.
3 Contexte
3.1 Mascaret
3.1.1 Généralités
Les Environnements Virtuels d’Apprentissage Humain développés par le CERV uti-
lisent la plate-forme MASCARET (Buche et al., 2004) (Multi-Agent System for Colla-
borative, Adaptive and Realistic Environment for Training) qui permet à des utilisateurs
(encadrant et apprenants) d’agir individuellement ou en collaboration dans un environne-
ment virtuel. Toutes les entités sont des agents capables de percevoir leur environnement,
de décider des actions qu’ils vont mener et enfin d’agir. Les agents peuvent être de diffé-
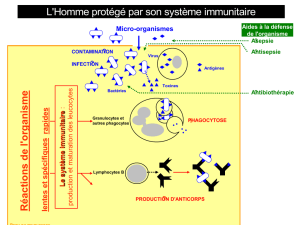
rentes natures. MASCARET repose sur deux méta-modèles VEHA et HAVE servant de
support à la détection de traces d’utilisation (cf figure 2). Ces deux méta-modèles sont des
extensions du méta-modèle UML.
Dans un EIAH (Environnement Informatique pour l’Apprentissage Humain), la fonction
pédagogique est assurée par un ITS (Intelligent Tutoring Systems). Dans MASCARET,
elle est gérée par un système multi-agents, composé d’agents pédagogiques, c’est-à-dire
ayant un rôle dans le processus enseignement-apprentissage : agents tuteur, assistant du
formateur, compagnon de l’apprenant, observateur d’activité... Ce système est désigné par
l’acronyme Mats :Multi-Agent Tutoring System. Le sous-système behave quant-à-lui, re-
groupe les modèles d’architecture des agents composant une application Mascaret : modules
de perception (d’un monde VEHA), de planification, de sélection d’actions (décrites avec
HAVE), de communication par messages...
3.1.2 Les méta-modèles VEHA et HAVE
VEHA (Virtual Environment supporting Human Activities) est un méta-modèle d’en-
vironnement virtuel servant à la description du monde virtuel dans lequel les utilisateurs
seront immergés (Chevaillier et al., 2009). En effet, ce modèle permet la modélisation des
objets qui constitueront l’environnement physique en fournissant la définiton de sa com-
position et de ses comportements. Il offre donc une représentation à la fois statique et
dynamique de l’environnement.
1Artificial Immune System
Rapport de stage de master recherche - page 2 -

Un système tutoriel intelligent à base de système immunitaire artificiel Juin 2009
Fig. 2 – Schéma du framework MASCARET (Chevaillier, 2006)
HAVE (Human Activities in a Virtual Environment) décrit les activités réalisées ou po-
tentiellement réalisables par les utilisateurs dans un monde virtuel décrit avec VEHA.
Il s’agit d’une extension du package CompleteActions d’UML et du package Activity de
VEHA. Il reprend aussi les concepts de la première version du modèle organisationnel de
MASCARET (Querrec et al., 2001). Une action de l’apprenant dans l’environnement est
caractérisée par un changement d’état observable dans les machines à états décrivant le
comportement des entités. Les activités sont definies sous forme d’enchaînements possibles
d’actions par une structure organisationnelle pour atteindre un objectif. Une action est
définie par des conditions de réalisation et des effets potentiels et éventuellement un com-
portement qui permet de la réaliser. Ces conditions sont des expressions logiques sur les
entités VEHA. La réalisation d’une action est décrite comme une séquence d’opérations à
réaliser. Ces dernières sont atomiques (Baudouin et al., 2007).
3.1.3 Le recueil des traces
MASCARET dispose d’une fonction de suivi de l’activité des agents, assurée par
l’agent pédagogique "observateur". Ce mécanisme est indépendant du domaine d’appren-
tissage et de la stratégie pédagogique. Cette section présente la manière dont sont enregis-
trées les traces au sein de l’ Environnement Virtuel d’Apprentissage Humain MASCARET.
Les informations citées ci-après sont toutes extraites de l’article (Baudouin et al., 2007).
Dans MASCARET, les communications entre les agents (apprenants, formateur, agents pé-
dagogiques, personnages de l’environnement) se font par échange de messages observables
par l’agent observateur. Ce dernier est en charge de l’interprétation des filtres de sélection
d’évènements (éléments à tracer) qui lui seront nécessaires pour connaître les entités dont
il doit notifier les occurrences d’évènements. Ceci est possible car dans MASCARET tous
les éléments du modèle sont réifiés. Les traces issues de MASCARET sont enregistrées au
format XML. L’exemple ci-dessous illustre le contenu d’une trace relevée lors d’une expé-
rience. On y retrouve les informations suivantes :
– l’identificateur de l’évènement,
– la date de la trace,
– le type d’action réalisée,
Rapport de stage de master recherche - page 3 -
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
1
/
41
100%