Fiche technique LMQ24A

www.belimo.fr T2-LMQ24A • fr • v1.2 • 08.2010 • Sous réserve de modications 1 / 3
Fiche technique LMQ24A
Servomoteur de clapet déstiné au réglage
de clapets d'air dans les installations de
ventilation et de climatisation du bâtiment
•Tailledeclapetd'air:env.0,8m2
•Couple4Nm
•TensionnominalAC/DC24V
•Commande:tout-ou-rien
(le servomoteur n'est pas conçu pour les
applications 3 points)
•Tempsdecourse2,5s
Caractéristiquestechniques
Donnéesélectriques Tension nominale AC 24 V, 50/60 Hz / DC 24 V
Plage de fonctionnement AC 19.2 ... 28.8 V / DC 21.6 ... 28.8 V
Puissance
consommée
Marche
Position de repos
Dimensionnement
13 W pour couple nominal
2 W
23 VA (I max. 20 A @ 5 ms)
Raccordement Câble 1 m, 3 x 0.75 mm2
Valeursfonctionnelles Couple de rotation (couple nominal) Min. 4 Nm pour tension nominal
Sens de rotation Réversible, par bouton de réglage 0 ou 1
Commande manuelle Débrayage du réducteur avec bouton-poussoir
avec possibilité de le bloquer
Angle de rotation Max. 95° Peux être limité des deux côtés par des
butées mécaniques réglables
Limitation de l'angle de rotation min. 30°
Temps de course 2,5 s / 90°
Adaptation automatique de la plage de
commande pour correspondre à l'angle de
rotation
Activation manuelle de l’adaptation par bouton
"Adaptation"
Niveau de puissance sonore 52 dB (A)
Indication de la position Mécanique, embrochable
Couple négatif
!
≤50% du couple nominal (Attention: utilisable avec
restrictions. Contactez votre commercial Belimo)
Sécurité Classe de protection III Basse tension de protection
UL Class 2 Supply
Indice de protection IP54 dans toutes les positions de montages
NEMA 2, UL Enclosure Type 2
CEM CE conforme 2004/108/EC
Certication Certied IEC/EN 60730-1 et IEC/EN 60730-2-14
cULus selon UL 60730-1A et UL 60730-2-14
et CAN/CSA E60730-1.02
Fonctionnement Type 1
Tension assignée de choc 0.8 kV
Degré de pollution de l'environnement 3
Température ambiante –30 ... +40°C (sans restriction)
!
+40 ... +50°C (Sous conditions. Merci de contacter
votre commercial Belimo)
Température de stockage –40 ... +80°C
Humidité ambiante 95% hum. relative., sans condensation
Entretien Sans entretien
Dimensions/Poids Dimensions Voir «Dimensions» on page 3
Poids Approx. 850 g

LMQ24A ServomoteurdeclapetAC/DC24V,4Nm,
Tempsdecoursede2.5s
2 / 3 T2-LMQ24A • fr • v1.2 • 08.2010 • Sous réserve de modications www.belimo.fr
Consignesdesécurité
!
• Leservomoteurdeclapetnedoitpasêtreutilisépourlesapplicationsn'appartenantpas
audomainespécifié,notammentpasdanslesavionsnidanstoutautremoyendetransport
aérien.
• Lemontagedoitcefairepardespersonnesspécialisés.Toutesréglementationsofficielles
ouréglementationsémanantd’uneautoritéreconnuedoiventêtreobservéesdurant
l’installation.
• Leservomoteurnecontientaucunepiècepouvantêtreremplacéeouréparéeparl'utilisateur.
• Lecâbleélectriquenedoitpasêtredémonté.
• Uneadaptationestnécessairelorsdelamiseenmarcheouaprèsunréglagedel'anglede
rotation(appuyezsurleboutond'adaptationunefois)
• Pourdéterminerlecouplederotationrequis,tenircomptedesindicationsdufabricantde
clapets(section,type,lieudemontagedesclapets),ainsiqu'auxconditionsaérauliques.
• L'appareilcontientdescomposantsélectriquesetélectroniquesetnedoitpasêtremis
auxorduresménagères.Lalégislationenvigueurdanslepaysconcernéedoitêtrerespectée.
Caractéristiquesduproduit
Montage direct simple Montage direct simple sur l'axe du clapet avec noix d'entraînement universelle, blocage contre
la torsion avec barrette d'arrêt jointe.
Commandemanuelle Actionnement manuel possible avec bouton-poussoir (débrayage temporaire / permanent)
Angle de rotation réglable Angle de rotation réglable avec butées mécaniques.
Un minimum de 30° d'angle de rotation est nécessaire
Sécurité de fonctionnement élevée Le servomoteur est protégé contre les surcharges, ne requiert pas de contact de n de course et
s'arrête automatiquement en butée
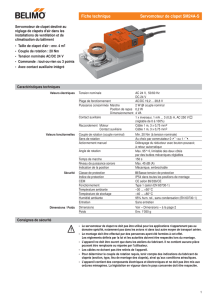
Positiondedépart Lors de la première mise sous tension, le servomoteur réalise une adaptation. Après un appui
sur le bouton de débrayage, il se déplace en position de départ.
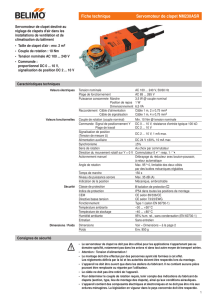
Pos.Directionderotation Positiondedépart
1
0
0
ccw
Arrêt à
gauche
1
cw
Arrêt à
droite
The actuator then moves into the position dened by the control signal.
Adaptationetsynchronisation Durant l'adaptation, le servomoteur mémorise ses positions haute et basse. La detection des
positions permet de stopper le moteur progressivement et de protéger ainsi le mécanisme.
Durant la phase de synchronisation, le servomoteur bouge vers sa position initiale et calibre
sont angle.
Accessoires
Description Fiche technique
Accessoires électriques Contact auxiliaire S..A T2 - S..A..
Potentiomètre de recopie P..A.. T2 - P..A..
Adaptateur Z-SPA
La commande de cet adaptateur est nécessaire pour le montage d'un contact
ou d'un potentiomètre - la noix de serrage doit toutefois être installer à
l'arrière du servomoteur.
Accessoires mécaniques Plage de fonctionnement T2 - Z-NM..A..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.

LMQ24A ServomoteurdeclapetAC/DC24V,4Nm,
Tempsdecoursede2.5s
www.belimo.fr T2-LMQ24A • fr • v1.2 • 08.2010 • Sous réserve de modications 3 / 3
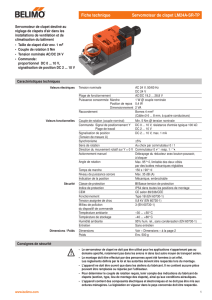
Installation électrique
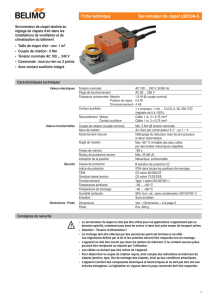
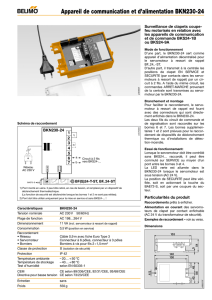
Schémasdeconnexion
123
1
0
–+
T
~
Couleursdescâbles:
1 = noir
2 = rouge
3 = blanc
Remarques
• Connexion via transformateur de sécurité.
• Raccordement parallèle possible. Tenir compte
des données de performance pour l'alimentation
!
Sens de rotation
1
0
Élémentsd'afchageetdecommande
1Sélecteur de sens de rotation
Commutation: Changement de sens de rotation
2Bouton-poussoiretLEDvert
Eteint:
Allumé:
Bouton-poussoir:
Pas d'alimentation en tension ou dérangement
Marche
Déclenchement de l'adaptation d'angle, puis marche normale
3Bouton-poussoiretLEDjaune
Eteint:
Allumé:
Bouton-poussoir:
Fonctionnement standard
Procédure d'adaptation ou de synchronisation active
Pas d'action
4Débrayageduservomoteur
Bouton-poussoir:
Relâchement du
bouton:
Réducteur débrayé, arrêt du moteur, actionnement manuel possible
Réducteur embrayé, démarrage de la synchronisation, puis marche normale
Vérierleraccordementdel'alimentationélectrique
a) 2 éteint et 3 Allumé Vérier l'alimentation électrique.
Possible et peut être inversé
b) 2 Clignotement et 3
Clignotement
4
1
2
3
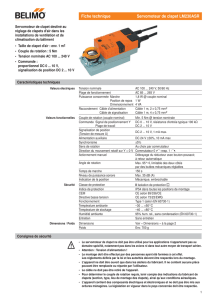
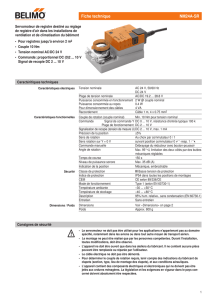
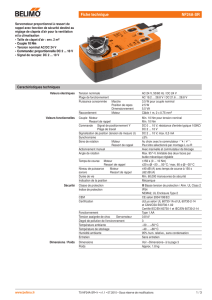
Dimensions[mm]
Schémas dimensionnels
124
52
75
Axedeclapet Long.
≥40 8 ... 26,7 ≥8 ≤26,7
* ≥20 8 ... 20 ≥8 ≤20
* Option (Accessoire K-SA)
Lorsqu'un contact de position ou un potentiomètre
est utilisé, voir «Accessoires»
80
25 41
121
.
.
.
.
.
.
.
.
.
1
/
3
100%