revision st et ste - La science et fiction de Robert

1
L’atome et les éléments
1 !QU’EST-CE QUE L’ATOME"?
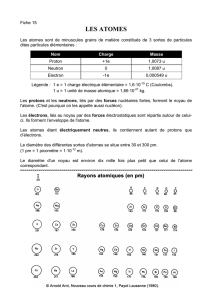
•!L’atome est la plus petite particule de matière. Il ne peut pas être divisé chimiquement (p. 7).
•!Comme l’atome est trop petit pour qu’on puisse l’observer directement, les scientifiques ont imaginé divers
modèles pour le représenter (p."7).
•!Selon Dalton, l’atome est semblable à une bille, solide et indivisible. Tous les atomes d’un même élément sont
identiques (même masse, même taille, mêmes propriétés chimiques), mais diffèrent de ceux des autres éléments
(p."8).
•!L’électron est une des particules qui constituent l’atome. Il porte une charge négative (p. 11).
•!Le proton est une des particules qui constituent l’atome. Il est situé dans le noyau et porte une charge positive (p.
13).
•!Le modèle atomique de Rutherford-Bohr est une représentation de l’atome incluant un noyau très petit, composé
de protons chargés positivement, autour duquel les électrons, de charge négative, circulent selon des orbites
spécifiques (p. 15).
!•!Le neutron est une des particules qui constituent l’atome. Avec le proton, il forme le noyau. Il ne possède
aucune charge électrique. Il est donc neutre (p. 16).
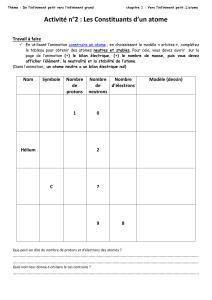
!•!Le modèle atomique simplifié est une représentation de l’atome indiquant le nombre de protons et de
neutrons présents dans le noyau, ainsi que le nombre d’électrons présents dans chacune des couches
électroniques (p. 16).
2 !LA CLASSIFICATION PÉRIODIQUE DES ÉLÉMENTS
•!Une classification périodique est une façon de classer les éléments selon certaines de leurs propriétés (p."17).
•!Le tableau périodique des éléments est une représentation dans laquelle les éléments sont regroupés selon leurs
propriétés physiques et chimiques (p."17).
•!Les éléments peuvent être classés en trois catégories": les métaux, les non-métaux et les métalloïdes (p."20).
•!Un électron de valence est un électron situé sur la dernière couche électronique d’un atome (p."21).
•!Une famille correspond à une colonne du tableau périodique. Les éléments d’une même famille ont des
propriétés chimiques semblables parce qu’ils ont tous le même nombre d’électrons de valence (p."21).
•!Une période correspond à une rangée du tableau périodique. Tous les éléments d’une période ont le même
nombre de couches électroniques (p."23).
!•!La périodicité des propriétés est la répétition ordonnée des propriétés d’une période à l’autre (p."24).
•!Le numéro atomique représente le nombre de protons que contient le noyau d’un atome. Il permet de
distinguer un élément d’un autre (p."24).
!•!La masse atomique relative correspond à la masse d’un atome établie par comparaison avec un élément
de référence, soit le carbone 12 (p. 25).
!•!Le nombre de masse est un nombre entier indiquant la somme du nombre de protons et de neutrons d’un
atome (p."25).
!•!Un isotope est un atome d’un élément ayant le même nombre de protons qu’un autre atome du même
élément, mais un nombre différent de neutrons (p."26).
3 !LA REPRÉSENTATION DES ATOMES
•!Les informations nécessaires pour représenter un atome sont fournies par le tableau périodique (p."27).
•!La notation de Lewis est une représentation simplifiée de l’atome dans laquelle seuls les électrons de valence
sont illustrés. Ils sont disposés un par un selon les quatre points cardinaux autour du symbole chimique, puis,
lorsque ces quatre points sont occupés, ils peuvent être doublés pour former des paires (p. 27).
ST et STE Résumé des chapitres 1 à 14
CHAPITRE 1

2
•!Selon le modèle de Rutherford-Bohr, un petit noyau de charge positive est représenté à l’aide d’une petite boule,
qui porte le numéro atomique de l’élément et le signe «"+"» (symbolisant les protons), autour de laquelle sont
représentés autant de cercles qu’il y a de couches électroniques (le nombre de couches correspond au numéro
de la période). Les électrons de valence (boules plus petites dont l’intérieur porte le signe «"–"») sont disposés
sur la couche électronique la plus éloignée, selon les quatre points cardinaux, comme dans la notation de Lewis.
Les électrons manquant pour atteindre le numéro atomique sont représentés pour compléter les couches
électroniques (p."27-28).
!•!D’après le modèle atomique simplifié, l’atome est représenté à l’aide de chiffres, de symboles et d’arcs de
cercles. Cette représentation permet de repérer facilement le nombre de protons et de neutrons ainsi que
de visualiser le nombre d’électrons présents sur chaque couche électronique. Les protons et les
électrons sont représentés comme dans le modèle de Rutherford-Bohr, sauf que la lettre «"p"» est
indiquée après le nombre de protons, la charge positive (le signe «"+"») est mise en exposant, des arcs de
cercles remplacent les cercles et le nombre d’électrons est indiqué en chiffres suivi du symbole «"e"» et
du signe «"–"» en exposant. Le nombre de neutrons (calculé en soustrayant le nombre de masse du
numéro atomique de la masse atomique relative arrondi au nombre entier) est indiqué dans le noyau
suivi du symbole «"n"» (p."28).
•!Comme son nom l’indique, dans le modèle «"boules et bâtonnets"», l’atome est symbolisé par une boule dont la
taille est, généralement, proportionnelle à son nombre de couches électroniques. Les liens qui l’unissent aux
autres atomes sont illustrés à l’aide de bâtonnets (p."29).
4 !LA NOTION DE MOLE
•!La mole est la quantité qui équivaut au nombre d’atomes dans exactement 12 g de carbone 12. Son
symbole est «"mol"» (p."30).
•!La masse molaire d’une substance est la masse d’une mole de cette substance (p."30).
•!Le nombre d’Avogadro représente la quantité d’entités présentes dans une mole. Il équivaut à 6,02 × 1023
(p."31).
Les molécules et les solutions
1 !QU’EST-CE QU’UNE MOLÉCULE"?
•!Une molécule est un ensemble de deux ou de plusieurs atomes liés chimiquement (p."40).
•!Un ion est un atome qui porte une charge électrique à la suite de la perte ou du gain d’un ou de plusieurs
électrons (p."42).
!•!Un ion polyatomique est un groupe de deux atomes ou plus chimiquement liés et portant une charge
électrique à la suite de la perte ou du gain d’un ou de plusieurs électrons (p."44).
•!Une liaison chimique est une union de deux atomes à la suite du transfert ou du partage d’un ou de
plusieurs électrons (p."45).
•!Une liaison ionique est le résultat du transfert d’un ou de plusieurs électrons d’un atome (généralement
un métal) à un autre atome (généralement un non-métal) (p."46).
•!Une liaison covalente est le résultat du partage d’une ou de plusieurs paires d’électrons entre deux
atomes (généralement deux non-métaux) (p."46).
•!La formule chimique est une représentation symbolique d’une molécule. Le symbole chimique de chacun
des éléments qui la compose doit y apparaître (p."48).
2 LES PROPRIÉTÉS DES SOLUTIONS
•!Une solution est un mélange homogène dans lequel on ne peut pas distinguer les substances qui le composent,
même avec l’aide d’un instrument d’observation (p."51).
•!Une solution aqueuse est une solution dans laquelle le solvant est l’eau (p."51).
•!La concentration d’une solution correspond à la quantité de soluté dissous par rapport à la quantité de solution
(p."52).
•!La concentration en PPM"(ou en parties par million) correspond au nombre de parties de soluté dissous dans un
million de parties de solution (p."53).
CHAPITRE 2

3
•!La concentration molaire équivaut au nombre de moles de soluté dissous dans un litre de solution
(p."54).
•!Un électrolyte est une substance qui, dissoute dans l’eau, permet le passage du courant électrique (p."55).
•!La conductibilité électrique d’une solution est sa capacité de permettre le passage du courant électrique (p."55).
•!La dissociation électrolytique est la séparation d’une substance dissoute en deux ions de charges opposées
(p."55).
•!La force d’un électrolyte correspond à son taux de dissociation électrolytique. Plus ce taux est élevé,
plus l’électrolyte est fort (p."58).
•!Un acide est une substance qui libère des ions H+ en solution aqueuse (p."58).
•!Une base est une substance qui libère des ions OH- en solution aqueuse (p."59).
•!Un sel est une substance provenant de la liaison entre un ion métallique et un ion non métallique (autres que les
ions H+ et OH-) (p."59).
•!Le Ph est une propriété qui permet de distinguer les solutions acides, les solutions basiques et les solutions
neutres (p."60).
•!En fait, le Ph est une indication de la concentration des ions H+ présents dans une solution (p."61).
L’énergie et ses manifestations
1 !QU’EST-CE QUE L’ÉNERGIE"?
•!L’énergie est la capacité d’accomplir un travail ou de provoquer un changement (p."71).
•!Un transfert d’énergie est le passage de l’énergie d’un milieu à un autre (p."71).
•!Une transformation d’énergie est le passage de l’énergie d’une forme à une autre (p."71).
•!La loi de la conservation de l’énergie implique que l’énergie ne peut être ni créée ni détruite": elle peut seulement
être transférée ou transformée. La quantité totale d’énergie d’un système isolé demeure toujours constante
(p."71).
•!Le rendement énergétique est le pourcentage d’énergie consommée par une machine ou un système qui a été
transformée en énergie utile (p. 72).
•!L’énergie thermique est l’énergie que possède une substance en raison de la quantité de particules qu’elle
contient et de leur température (p."73).
•!La chaleur est un transfert d’énergie thermique entre deux milieux de températures différentes. La chaleur passe
toujours du milieu ayant la température la plus élevée au milieu ayant la température la plus basse (p."73).
•!La température est une mesure du degré d’agitation des particules d’une substance (p."74).
•!La capacité thermique massique correspond à la quantité d’énergie thermique qu’il faut fournir à un
gramme d’une substance pour augmenter sa température de un degré Celsius (p."74).
•!L’énergie cinétique est l’énergie que possède un objet en raison de son mouvement (p."76).
•!L’énergie cinétique d’un objet dépend de sa masse et de sa vitesse (p."76).
•!L’énergie potentielle gravitationnelle est l’énergie de réserve que possède un objet en raison de sa
masse et de sa hauteur par rapport à une surface de référence (p."77).
•!La somme de l’énergie cinétique et de l’énergie potentielle constitue l’énergie mécanique d’un système
(p."78).
2 LE MOUVEMENT ET LES FORCES
•!Dans la plupart des cas, on trouve une ou plusieurs forces à l’origine du mouvement d’un objet (p."79).
•!La vitesse, le déplacement, le temps et l’accélération sont les principales variables qui permettent de
décrire le mouvement (p."79).
•!Une force est une action capable de modifier le mouvement d’un objet ou de le déformer en le poussant
ou en le tirant (p."80).
CHAPITRE 3

4
•!Une force est toujours exercée par un corps sur un autre corps. De plus, elle est toujours orientée dans
une direction (p."80).
•!Il existe quatre principaux types de forces": la force gravitationnelle, la force électromagnétique, la force
nucléaire forte et la force nucléaire faible (p."81).
•!La force gravitationnelle est une force d’attraction qui s’exerce entre tous les objets en raison de leur
masse et de la distance qui les sépare (p."81).
•!La masse est une mesure de la quantité de matière d’un objet (p."83).
•!Le poids est une mesure de la force gravitationnelle exercée sur un objet (p."83).
•!La force efficace est la composante d’une force responsable de la modification du mouvement d’un objet.
Elle correspond à la composante de la force parallèle au mouvement produit (p."88).
•!Un travail est effectué lorsqu’une force appliquée sur un objet provoque un déplacement de cet objet, ou
d’une partie de celui-ci, dans la même direction que cette force ou que l’une de ses composantes (p."90).
Les transformations de la matière
1 !QU’EST-CE QU’UNE TRANSFORMATION DE LA MATIÈRE"?
•!Une transformation physique ne modifie ni la nature ni les propriétés caractéristiques de la matière. Les atomes
et les molécules ne changent pas (p."108).
•!Une transformation chimique modifie la nature et les propriétés caractéristiques de la matière. Elle implique un
réarrangement des liaisons entre les atomes et la formation de nouvelles molécules (p."108).
•!Une transformation nucléaire implique un réarrangement des particules qui composent le noyau des atomes et la
formation de nouveaux éléments (p."108).
2 LES TRANSFORMATIONS CHIMIQUES
•!Une transformation chimique est aussi appelée «"réaction chimique"» (p."109).
•!La loi de la conservation de la masse stipule que la masse totale des réactifs est toujours égale à la masse totale
des produits (p."111).
•!Balancer une équation chimique consiste à placer des coefficients devant chaque réactif et chaque produit, de
façon que le nombre d’atomes de chaque élément du côté des réactifs soit égal au nombre d’atomes de chaque
élément du côté des produits (p."111).
•!La stœchiométrie est l’étude des quantités de réactifs nécessaires à la réalisation d’une réaction
chimique et des quantités de produits qui seront formées (p."112).
•!Une réaction exothermique est une transformation qui dégage de l’énergie (p."114).
•!Une réaction endothermique est transformation qui absorbe de l’énergie (p."114).
•!La neutralisation acidobasique est une transformation chimique qui implique la réaction d’un acide avec
une base, ce qui produit un sel et de l’eau (p."119).
•!L’oxydation est une transformation chimique impliquant de l’oxygène ou une substance ayant des
propriétés semblables (p."120).
•!La combustion est une forme d’oxydation qui libère beaucoup d’énergie (p."122).
•!La respiration cellulaire est une transformation chimique qui utilise le glucose et le dioxygène afin de dégager de
l’énergie. Elle produit également du dioxyde de carbone et de l’eau (p."123).
•!La photosynthèse est une transformation chimique qui produit du glucose et du dioxygène à partir de l’énergie du
soleil, du dioxyde de carbone et de l’eau (p."124).
3 LES TRANSFORMATIONS NUCLÉAIRES
•!La stabilité nucléaire correspond à l’état d’un noyau dans lequel la force nucléaire est supérieure aux
forces de répulsion électrique des protons (p."125).
•!La radioactivité est un processus naturel au cours duquel un atome instable se transforme spontanément
en un ou plusieurs atomes plus stables, tout en émettant de l’énergie sous forme de rayons (p."126).
CHAPITRE 4

5
•!Le temps de demi-vie correspond au temps nécessaire à la désintégration de la moitié des noyaux d’un
échantillon de matière radioactive (p."128).
•!La fission nucléaire est une réaction nucléaire qui consiste à briser le noyau d’un gros atome pour
former deux ou plusieurs noyaux d’atomes plus légers (p."129).
•!La fusion nucléaire est une réaction nucléaire qui consiste à fusionner deux petits noyaux d’atomes afin
de former un noyau plus lourd (p. 131).
L’électricité et le magnétisme
1 !QU’EST-CE QUE L’ÉLECTRICITÉ"?
!•!L’électricité est l’ensemble des phénomènes provoqués par les charges positives et négatives (p."140).
!•!La charge électrique est une propriété des protons et des électrons. Un proton porte une charge positive, tandis
qu’un électron porte une charge négative (p."141).
!•!Un corps chargé négativement possède un surplus d’électrons (plus d’électrons que de protons) (p."141).
!•!Un corps chargé positivement présente un déficit d’électrons (moins d’électrons que de protons (p."141).
!•!La charge élémentaire est la charge portée par un électron ou un proton. Elle vaut 1,602 × 10-19 C (p."141).
!•!Le coulomb est l’unité de mesure de la charge électrique. Un coulomb équivaut à la charge de 6,25 × 1018
électrons ou protons (p."141).
!•!L’électrisation consiste à créer un déséquilibre des charges dans la matière (p."142).
!•!Un conducteur est une substance qui permet aux charges de circuler librement (p."143).
!•!Un isolant est une substance qui ne permet pas aux charges de circuler librement (p."143).
!•!Un champ électrique correspond à la région de l’espace dans laquelle la force électrique d’un corps
chargé peut agir sur un autre corps chargé (p."144).
2 L’ÉLECTRICITÉ STATIQUE
!•!L’électricité statique est l’ensemble des phénomènes liés aux charges électriques au repos (p."145).
!•!On peut électriser la matière de différentes façons": par frottement, conduction ou induction (p."146).
!•!La loi de Coulomb établit que la force qui s’exerce entre deux particules immobiles électriquement
chargées est directement proportionnelle au produit de leur charge et inversement proportionnelle au
carré de leur distance (p."149).
3 L’ÉLECTRICITÉ DYNAMIQUE
!•!L’électricité dynamique est l’ensemble des phénomènes liés aux charges électriques en mouvement (p."150).
!•!Un courant électrique est un déplacement ordonné des charges négatives portées par les électrons (p."150).
!•!Le sens conventionnel du courant correspond à la direction qu’emprunterait une particule positive dans un circuit
électrique. C’est pourquoi il va de la borne positive de la source de courant vers la borne négative (p."150).
!•!L’intensité du courant correspond au nombre de charges qui circulent en un point d’un circuit électrique par
seconde (p."151).
!•!La différence de potentiel correspond à la quantité d’énergie transférée entre deux points d’un circuit électrique
(p."152).
!•!La résistance électrique est la capacité d’un matériau de s’opposer au passage du courant électrique (p."153).
!•!La loi d’Ohm établit que, pour une résistance donnée, la différence de potentiel dans un circuit électrique est
directement proportionnelle à l’intensité du courant (p."154).
!•!La puissance électrique est la quantité de travail que peut accomplir un appareil électrique par seconde (p."155).
!•!Un circuit électrique est un montage qui permet à des charges électriques de circuler en boucle, c’est-à-dire de
se maintenir en mouvement (p."156).
!•!Un circuit en série est un circuit dans lequel les éléments sont branchés les uns à la suite des autres (p."158).
CHAPITRE 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%