Mécanique du solide

2
Chapitre
Ce chapitre propose des activités de mécanique classique associant l’utilisation du capteur de
mouvements CBR2 ou de force, l’aspect énergétique est largement abordé. L’exploitation de
l’ensemble des applications de TI-Nspire trouve dans ce contenu sa pleine mesure.
Chapitre 2.
Mécanique du solide

Mécanique du solide 81
© T³ France 2012 / Photocopie autorisée
Sommaire
Chapitre 2. Mécanique du solide ........................................................................... 80
ÉNERGIE MÉCANIQUE........................................................................................... 83
(Fiche professeur) ................................................................................................ 83
ENERGIE MÉCANIQUE........................................................................................... 91
(Fiche élève) ......................................................................................................... 91
GALILÉE ET LE MOUVEMENT .............................................................................. 98
(Fiche professeur) ................................................................................................ 98
GALILÉE ET LE MOUVEMENT ............................................................................ 104
(Fiche élève) ....................................................................................................... 104
TRAJECTOIRE D’UN BALLON ............................................................................ 108
(Fiche professeur) .............................................................................................. 108
TRAJECTOIRE D’UN BALLON ............................................................................ 113
(Fiche élève) ....................................................................................................... 113
REBONDS D’UNE BALLE ..................................................................................... 116
(Fiche professeur) .............................................................................................. 116
REBONDS D’UNE BALLE ..................................................................................... 121
(Fiche élève) ....................................................................................................... 121
ENERGIE MECANIQUE ET CHUTE D’UNE BALLE ......................................... 124
(Fiche professeur) .............................................................................................. 124
ENERGIE MECANIQUE ET CHUTE D’UNE BALLE ......................................... 128
(Fiche élève) ....................................................................................................... 128
MOUVEMENT D’UN PARACHUTISTE ............................................................... 132
(Fiche professeur) .............................................................................................. 132
MOUVEMENT D’UN PARACHUTISTE ............................................................... 139
(Fiche élève) ....................................................................................................... 139
MOUVEMENT SUR UN PLAN INCLINÉ ............................................................. 143
(Fiche professeur) .............................................................................................. 143
MOUVEMENT SUR UN PLAN INCLINÉ ............................................................. 149
(Fiche élève) ....................................................................................................... 149
POIDS ET MASSE .................................................................................................. 155
(Fiche professeur) .............................................................................................. 155
POIDS ET MASSE .................................................................................................. 164
(Fiche élève) ....................................................................................................... 164
DÉCRIRE LE MOUVEMENT D’UN VÉHICULE ................................................. 169
(Fiche professeur) .............................................................................................. 169
COMMENT DECRIRE LE MOUVEMENT D’UN VEHICULE............................ 173
(Fiche élève) ....................................................................................................... 173
MASSE DE LA TERRE........................................................................................... 178

82 Expérimenter en sciences avec TI-Nspire
© T³ France 2012 / Photocopie autorisée
CHAMP ET FORCES ............................................................................................. 181
(Fiche professeur) .............................................................................................. 181
CHAMP ET FORCES ............................................................................................. 185
(Fiche élève) ....................................................................................................... 185
CRASH-TEST ET SÉCURITÉ ROUTIÈRE ......................................................... 192
(Fiche professeur) .............................................................................................. 192
CRASH-TEST ET SÉCURITÉ ROUTIÈRE ......................................................... 199
(Fiche élève) ....................................................................................................... 199
MOUVEMENT CIRCULAIRE UNIFORME .......................................................... 206
(Fiche professeur) .............................................................................................. 206
MOUVEMENT CIRCULAIRE UNIFORME .......................................................... 211
(Fiche élève) ....................................................................................................... 211
MOUVEMENT RÉTROGRADE DE MARS ......................................................... 215
(Fiche professeur) .............................................................................................. 215
MOUVEMENT RÉTROGRADE DE MARS ......................................................... 222
(Fiche élève) ....................................................................................................... 222
LE PENDULE ........................................................................................................... 226
(Fiche professeur) .............................................................................................. 226
LE PENDULE ........................................................................................................... 230
(Fiche élève) ....................................................................................................... 230
L’OSCILLATEUR HARMONIQUE ........................................................................ 233
(Fiche professeur) .............................................................................................. 233
L’OSCILLATEUR HARMONIQUE ........................................................................ 237
(Fiche élève) ....................................................................................................... 237
PARAMÈTRES D’UN OSCILLATEUR ................................................................. 241
(Fiche professeur) .............................................................................................. 241
PARAMÈTRES D’UN OSCILLATEUR ................................................................. 248
(Fiche élève) ....................................................................................................... 248
ÉTUDE ÉNERGÉTIQUE D’UN OSCILLATEUR ................................................ 251
(Fiche professeur) .............................................................................................. 251
ÉTUDE ÉNERGÉTIQUE D’UN OSCILLATEUR ................................................ 256
(Fiche élève) ....................................................................................................... 256
ENERGIE POTENTIELLE DE PESANTEUR ..................................................... 258
(Fiche professeur) .............................................................................................. 258
ÉNERGIE POTENTIELLE DE PESANTEUR ..................................................... 264
(Fiche élève) ....................................................................................................... 264
AMORTISSEURS D’UN VÉHICULE .................................................................... 268
(Fiche professeur) .............................................................................................. 268
AMORTISSEURS D’UN VÉHICULE .................................................................... 273
(Fiche élève) ....................................................................................................... 273

Mécanique du solide 83
© T³ France 2012 / Photocopie autorisée
ÉNERGIE MÉCANIQUE
(Fiche professeur)
Auteur : Jean-Louis Balas TI-Nspire CAS
Mots-clés : énergie potentielle, énergie cinétique, conservation, chronophotographie.
Fichiers associés : energie-mecanique_prof.tns; energie-mecanique_eleve.tns
1. Objectifs
Connaître l’énergie cinétique et potentielle de pesanteur d’un solide en translation dans un champ de
pesanteur uniforme.
Exploiter le principe de conservation de l’énergie.
2. Énoncé
Les lois de la physique sont fondées sur un principe de conservation qui affirme que, dans un système isolé,
il existe une grandeur, l'énergie, qui se conserve lors de transformations successives subies par ce système.
L'énergie que possède un système mécanique (appelée simplement "énergie mécanique") est une énergie
dont les transformations se produisent à l'échelle macroscopique.
Ainsi tout problème de mécanique met en jeu deux types d'énergie : potentielle et cinétique (l'une pouvant
très bien se transformer en l'autre). L'énergie potentielle est liée à la position relative des différentes parties
d'un système. C'est, par exemple, le cas de l'énergie potentielle de pesanteur que possède un système {Terre-
objet} ou de l'énergie potentielle élastique que possède un ressort par exemple. L'énergie cinétique, elle, est
associée au mouvement d'un corps et est proportionnelle à la masse de ce corps, ainsi qu'au carré de sa
vitesse.
3. Matériel
un lab cradle et une calculatrice TI-Nspire,
un capteur de distance CBR2 et son câble de liaison USB B - mini USB,
une balle de tennis,
un support avec noix de serrage.

84 Expérimenter en sciences avec TI-Nspire
© T³ France 2012 / Photocopie autorisée
4. Conduite de l’activité
L’activité se divise en trois parties :
a) Utilisation de la plate forme TI-Nspire pour analyser une chronophotographie.
b) Réalisation expérimentale de la chute libre d’une balle de tennis.
c) Utilisation d’un simulateur afin de faciliter l’apprentissage des notions théoriques et de leurs représentations.
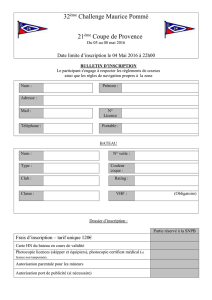
a. Analyse d’une chronophotographie
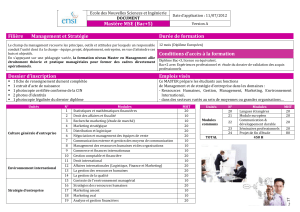
On a réalisé à partir d’une vidéo la chronophotogra-
phie1 d’une boule de pétanque de masse m = 800 g.
La vidéo est filmée à 25 images par secondes et sa
décomposition lors de la création de la chronophoto-
graphie a permis d’obtenir 18 images.
L’intervalle de temps séparant deux images est donc
1
25
t
s.
Mettre la calculatrice sous tension, puis ouvrir le
classeur energie-mecanique_eleve.tns.
Remarque : Si l’on souhaite créer le document, on a
la possibilité de le faire en utilisant le logiciel TI-
Nspire. L’insertion d’une image n’est pas possible à
partir de la calculatrice.
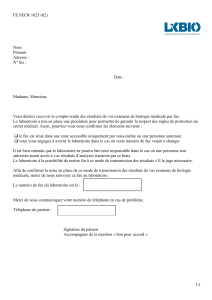
Sur la photographie, une règle de 1m a été posée. Un
calcul de proportionnalité va permettre à partir des
coordonnées du point M capturées manuellement
d’obtenir la position réelle de la boule de pétanque.
La distance AB a été stockée dans la variable e et
les coordonnées du point M dans les variables
(x0,y0).
Pour capturer directement par pointage les
coordonnées (x(t) ; y(t)) de la boule de pétanque à
l’instant t, déplacer le point M sur une trace de la
boule et appuyer sur les touches / ^.
Passer ensuite à la page 1.4 du classeur. Les
données sont sauvegardées dans le tableur.
1
Chronophotographie réalisé à l’aide du logiciel libre « ChronoPy » http://sciences-physiques.ac-
dijon.fr/archives/logiciels/auteurs/lanaud.htm partir d’une vidéo au format .avi
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
1
/
198
100%