C - Document sans nom

commande de moteurs électriques par convertisseurs à découpage
Denis Rabasté 1/13 IUFM Aix Marseille
Commande de moteurs électrique par convertisseurs à
découpage
1 Alimentation par hacheur d'une MCC à aimant
Le moteur présente des caractéristiques intéressantes pour les applications où on souhaite un
fonctionnement en vitesse variable (robotique, traction etc...). Nous avons en effet :
U
I
L
RE
U
E
K
C K I
≈
=
=
Ω
Ω étant la vitesse angulaire en rd/s
C étant le couple en Nm
K une constante de la machine
La MCC peut être vue comme un système dans lequel on entre une puissance électrique P = U I et
duquel on sort une puissance mécanique P = C Ω (dans le cas d'un rendement unitaire). Suivant le
signe de la puissance on obtient un fonctionnement en moteur ou en frein (c'est à dire en génératrice).
Ces considérations sont résumées par le graphique ci-dessous où le moteur est supposé entraîner un
véhicule électrique :
C = K I
= E / K
sens du
déplacemnent
sens du
déplacemnent
sens du
déplacemnent
sens du
déplacemnent
0
FREINAGE
FREINAGE
QUADRANT 2 QUADRANT 1
QUADRANT 4QUADRANT 3
Suivant les performances souhaitées (marche avant-arrière, freinage ou non), la MCC devra pouvoir
fonctionner dans les différents quadrants (du mot quadrature), l'alimentation devra donc être réversible
(ou non) en courant et/ou tension.
Trois types d'alimentations sont envisageables :
-Alimentation linéaire (transistor ballast par exemple) pour les faibles puissances (<100 W,
moteur de magnétophone par exemple)
-Redressement commandé de la tension secteur (par pont mixte thyristors-diodes ou par pont
tout thyristor), pour les fortes et moyennes puissances (>1 kW).

Alimentation des machines à courant continu par hacheur
Denis Rabasté 2/13 IUFM Aix Marseille
-Découpage haute fréquence (>20 kHz pour les systèmes récents) d'une tension continue
(souvent obtenue par le redressement filtrage de la tension secteur); exemples : robotique,
TGV sud est etc...
Nous limiterons notre étude à cette dernière possibilité pour laquelle nous présenterons les
schémas les plus couramment utilisés. Les interrupteurs commandés présentés sont des
IGBT (Insulated Gate Bipolar Transistor); ceux ci peuvent être remplacés par des transistors
MOS ou bipolaires. Les montages sont supposés fonctionner en conduction continue avec
une période fixe T.
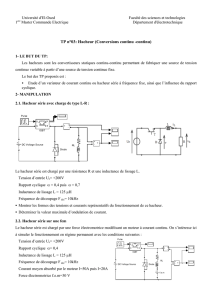
1.1 Hacheur un quadrant
On reconnaît un hacheur abaisseur (Buck). Si α est le rapport cyclique de U, on obtient <U> = α V.
L'inductance sert à lisser le courant dans le cas où l'inductance interne du moteur n'est pas suffisante
(moteur Axem discoïdal par exemple)
V =
U
I
D
T
R
MCC
tension U aux
bornes du moteur
courant I dan
s
l'induit
D
Tt
0
T
R
C
1.2 Hacheur quatre quadrants
C'est la synthèse des deux hacheurs précédents. Le montage est alors réversible en courant et
tension et peut donc fonctionner dans les quatre quadrants. On commande alternativement T
R1
T
R4
puis T
R2
T
R3
. Les transistors commandés ne sont traversés par un courant que si le sens de I le
permet, les diodes en antiparallèle prenant le relais le cas échéant. Afin d'éviter un court-circuit sur
l'alimentation on crée un temps mort entre les commande des deux diagonales T
R1
T
R4
et T
R2
T
R3.
La relation entre entrée et sortie est <U> = ( 2 α - 1 ) V, le rapport cyclique étant défini comme le
temps de conduction de la diagonale T
R1
T
R4
sur la période.
DT
R
D
T
R
MCC
DT
R
D
T
R
V =
U
I
1
2
3
4
1
2
3
4

Alimentation des machines à courant continu par hacheur
Denis Rabasté 3/13 IUFM Aix Marseille
t
0
I
U
C
On peut remarquer que le montage peut fournir un courant et une tension sinusoïdale en sortie
(après filtrage). Ce principe peut être utilisé pour la réalisation d'un onduleur autonome
(alimentation de secours pour ordinateur, alimentation de moteurs alternatifs etc...).
1.3 . Asservissement et commande en courant
Si on souhaite une vitesse bien précise, il est nécessaire de réaliser un asservissement en réinjectant
la mesure de la vitesse (effectuée par une dynamo tachymétrique par exemple) sur la commande.
Cependant, de même qu'un automobiliste n'appuie pas à fond sur l'accélérateur de sa voiture jusqu'a
atteindre la vitesse souhaitée, mais au contraire de manière intuitive, "écoute" le régime du moteur
pour le rendre optimal, de même dans le cas d'un moteur électrique une commande en vitesse seule
(c'est à dire en tension E=K'Ω) donnerait des performances dynamiques médiocres.
Aussi pour les puissances élevées ou les systèmes performants un premier asservissement de
courant contrôle le couple du moteur (C=K'I). Le hacheur se comporte alors comme un générateur de
courant commandé.
consigne
vitesse correcteur
boucle limitation
courant correcteur
boucle I Hacheur
Moteur
mesure
courant
mesure
vitesse
La figure ci-après donne un exemple d'utilisation du circuit intégré L292 qui réalise la boucle de
courant.

Alimentation des machines à courant continu par hacheur
Denis Rabasté 4/13 IUFM Aix Marseille
Le moteur est alimenté par un pont de quatre transistors (hacheur quatre quadrants), un circuit
33Ω 1nF aux bornes de l'induit limite les perturbations dues au collecteur. Les diodes du hacheur sont
externes au circuit intégré afin d'être adaptées par l'utilisateur à chaque cas particulier (rapidité,
courant etc). C'est en effet l'élément "délicat" dans un hacheur. Deux résistances RS
1
et RS
2
, externe
elle aussi (choix en fonction du problème, dissipation de puissance non désirable au niveau du circuit
intégré) permettent la mesure du courant dans l'induit grâce à un amplificateur différentiel (Cur. Sens;
Am.) à transconductance (sortie en courant) de gain 1/R4. Le courant de sortie de cet amplificateur est
filtré (parasites dus à la commutation) par le circuit R
F
C
F
avant d'attaquer l'amplificateur d'erreur
(Errror Ampl). Celui-ci joue le rôle de soustracteur entre la consigne de courant qui arrive depuis
l'amplificateur précédent (Level Shift) et la mesure de courant. Il sert également de correcteur
proportionnel-intégral (circuit RC). La sortie VTH attaque ensuite le comparateur qui impose le rapport
cyclique au pont de transistor (modulation de largeur d'impulsion). V
TH
est comparé à une tension
triangulaire fixant la fréquence de découpage par les éléments 15 kΩ 15 nF. Sur l'entrée V
1
on
applique une consigne de courant qui peut être la sortie d'une boucle de vitesse. La tension V
1
peut
être positive ou négative, l'amplificateur d'entrée la décalant de la tension de référence 8 V pour
l'adapter à l'alimentation unipolaire du circuit (V
S
entre 18 et 36 V).
Le circuit proposé peut commander un courant de 2 A dans le pont sous une tension de 36 V. La
fréquence de découpage est limitée à 30 kHz.
2 Commande d’un moteur pas à pas
2.1.1 Caractéristiques mécaniques
De part sa conception, le moteur pas à pas est prévu pour fonctionner normalement dans un
asservissement de position en boucle ouverte : aucun capteur de position n'est nécessaire à condition
de respecter certaines règles de manière à ne pas provoquer de "pertes de pas".
La première condition à respecter est évidement de ne pas entraîner une charge de couple résistant
supérieur au couple moteur. Ce n'est cependant pas suffisant.
Comme tout système en rotation, le fonctionnement est régi par l'équation fondamentale de la
dynamique :

Alimentation des machines à courant continu par hacheur
Denis Rabasté 5/13 IUFM Aix Marseille
Jd
dt
= C - C
M R
Ω
avec J : inertie de l'ensemble moteur charge
Ω : vitesse de rotation
C
M
: couple moteur
C
R
: somme des couples résistants
Il ne faudra donc pas vouloir imposer une accélération trop importante au démarrage, ni une
décélération trop grande en régime établi. La fréquence maximale d'alimentation du moteur sera donc
limitée au démarrage (en fonction du couple résistant et du moment d'inertie), de même que l'on ne
pourra passer brutalement d'une fréquence importante à une vitesse faible, sans provoquer une perte
de pas (et rendre inopérant un asservissement de position).
Le constructeur donne donc l'évolution de la fréquence d'alimentation du moteur en fonction du couple
de charge pour une inertie donnée, définissant trois zones : marche-arrêt (dite de démarrage ou start-
stop), entraînement ( ou survitesse) et interdite.
couple
résistant
fréquence
des pas
zone
interdite
zone de
démarrage zone
d'entraînement
2.1.2 . Alimentation électrique
Chaque phase du moteur peut être modélisée par une résistance R en série avec une inductance L, la
force électromotrice induite étant négligeable. Le couple nominal est atteint pour une valeur I
0
du
courant dans la phase.
2.1.2.1 Alimentation en tension
La limitation du courant à la valeur I
0
nécessite souvent avec les valeurs de tensions utilisées (5 V ou
12 V par exemple) la mise en série d'une résistance R
0
avec chaque phase. La constante de temps
τ=L/(R+R
0
) ralentit la montée du courant (donc du couple) et limite la vitesse maximale. La résistance
ajoutée consomme d'autre part de l'énergie.
courant dans
une phase t
τ
Cette solution n'est donc viable que pour des applications bas de gamme
2.1.2.2 Alimentation en courant
Les problèmes précédents sont résolus en alimentant chaque phase par un générateur de courant
constitué généralement d'un hacheur asservi en courant.
courant dans
une phase t
La vitesse de montée V/L du courant sera d'autant plus rapide que la tension d'alimentation V sera
grande.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%