API mise en oeuvre

TS Electrotechnique V1.0
S.Ph - 1 -
Mise en œuvre et raccordement des Automates
Programmables Industriels
1. Raccordement de l’unité de traitement......................................................................................2
2. Raccordement des entrées/sorties TOR de l’unité de traitement ...................................3
2.1 Principe de raccordement des entrées................................................................................3
2.2 Exemple de raccordement........................................................................................................3
2.3 Raccordement des capteurs à sorties statiques...............................................................4
2.4 Exemple de raccordement de détecteurs...........................................................................5
2.5 Caractéristiques des entrées logiques..................................................................................6
2.6 Entrées alternatives...................................................................................................................7
2.7 Caractéristiques des sortie TOR statiques........................................................................8
2.8 Caractéristiques des sortie TOR à relais...........................................................................9
3. Raccordement des entrées/sorties analogiques à l’unité de traitement........................11
3.1 Entrées analogiques...................................................................................................................11
3.2 Sorties analogiques....................................................................................................................13
4. Autres raccordements possibles sur l’unité de traitement.................................................14
4.1 Exemple d’utilisation..............................................................................................................15
4.2 Caractéristiques électriques...................................................................................................15
5. Modules de communication.............................................................................................................17

TS Electrotechnique V1.0
S.Ph - 2 -
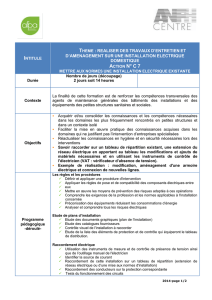
1. Raccordement de l’unité de traitement
On retrouve sur ce schéma de mise en œuvre des automates télémécanique gamme TSX 17 :
Q Sectionneur général.
KM Contacteur de ligne ou disjoncteur (facultatif).
KA Contacteur d'asservissement piloté par la sortie SECU 00,00 en marche auto.
Di1 Disjoncteur magnétothermique type GB2-CB 08 ou fusible.
Di2 Disjoncteur magnétothermique type GB2-CB .. ou fusible. Si une adaptation de tension est
nécessaire pour la commande des pré actionneurs, ajouter derrière Di2 un transformateur de
tension. Il faut relier un point du secondaire à la borne de terre Gnd.
Gnd Borne de terre. Doit être située le plus près possible de chaque borne de terre de
protection des modules.
RG Masse de référence à relier à la terre usine.
j Vers bornes d'alimentation des extensions en courant alternatif.
k Vers schéma circuit de commande.
l Vers commande des pré actionneurs des extensions en courant alternatif.
m Raccordement des terres de protection, à réaliser par un conducteur vert/jaune

TS Electrotechnique V1.0
S.Ph - 3 -
S = 2,5mm2, de longueur la plus courte possible
n 24VCC interne réservé à l'alimentation des capteurs raccordés au TSX 17 et à celle d'un
seul module de sorties analogiques TSX ASG 200.
Il est également possible de rencontrer des automates alimentés exclusivement en 24 V continu ou
alternatif.
2. Raccordement des entrées/sorties TOR de l’unité de traitement
2.1 Principe de raccordement des entrées
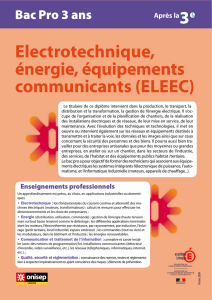
Dans la pratique, les entrées sont souvent groupées par 2, 4, 8, 16, 32 ou plus afin de limiter
le nombre de bornes de connexion. De ce fait ces différentes entrées, d’un point de vue de
l’information, ont un point commun électrique.
L’alimentation des différents capteurs est fournie soit par l’automate soit par une source de
tension externe (la tension d’alimentation est presque toujours de 24 V continu).
2.2 Exemple de raccordement
GND
Information
Alimentation
capteur
Adaptation en
tension
Mise en
forme
Capteur
Etage d’entrée API

TS Electrotechnique V1.0
S.Ph - 4 -
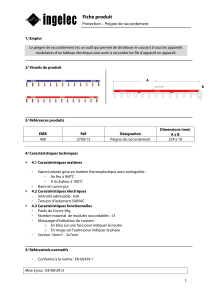
Sur l’exemple ci-dessus (automate de base Télémécanique TSX 17-21) on peut voir les
sorties sur la partie supérieure de l’API et les entrées sur la partie inférieure.
On peut noter que l’API est alimentable de 110 à 240 V AC.Il délivre aussi une alimentation
24 V CC pouvant fournir 250 mA. Cette fonction est très utile pour interfacer les entrées.
On remarque que toutes les entrées TOR ont un commun 0V déjà relié par le constructeur à
l’intérieur de l’automate ; le câblage des entrées de type contact libre de potentiel (ou contact sec)
s’en trouve simplifié.
Les sorties TOR à relais proposent différents groupes (de une à quatre) avec ou sans
commun.
2.3 Raccordement des capteurs à sorties statiques
Il existe de nombreux types de capteurs/détecteurs sur le marché ; Leur seul point commun est le
type de raccordement électrique comme on peut le voir ci dessous :
- capteurs deux fils : ils se câblent comme des interrupteurs de position mécanique
mais leur courant résiduel ou leur tension de déchet peut les rendre incompatibles avec certains
automates programmables industriels.

TS Electrotechnique V1.0
S.Ph - 5 -
- Capteurs 3 fils : il en existe deux types, à
sortie PNP pour les automates ayant des
entrées avec une masse commune.
(absorption de courant ou puit de courant)
- et NPN pour les automates ayant des
entrées avec un ‘ plus’ commun. (injection
de courant)
2.4 Exemple de raccordement de détecteurs
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%