Nouveaux concepts de traitement par aligneurs : le système Orthocaps

Orthod Fr 2014;85:253–264
c
EDP Sciences, SFODF, 2014
DOI: 10.1051/orthodfr/2014011
Disponible en ligne sur :
www.orthodfr.org
Article original
Clinique et varia
Nouveaux concepts de traitement par aligneurs :
le système Orthocaps
Wajeeh KHAN*
Traduit par Sophie ROZENCWEIG
An der Bewer 8, D-59069 Hamm, Allemagne
(Reçu le 2 février 2014, accepté le 13 février 2014)
MOTS CLÉS :
CFAO /
Interface dent-aligneur /
Mecanotransduction /
Aligneurs /
Prototypage rapide /
Patins de friction
RÉSUMÉ – Déplacer les dents avec les aligneurs représente un défi, tout comme
celui d’utiliser d’autres appareils amovibles. Les limites mécaniques des aligneurs
peuvent être en partie contrecarrées par l’augmentation de l’adhérence de la gout-
tière sur les dents, mais également en choisissant, pour leur fabrication, des ma-
tériaux en fonction de leur module d’élasticité. On peut obtenir des résultats tout à
fait satisfaisants pour des patients en recherche d’une alternative à l’appareil multiat-
tache, à la fois esthétique et confortable, si l’on établit un plan de traitement adapté
et que l’on sélectionne des auxiliaires adéquats. Les caractéristiques spécifiques au
système Orthocaps sont l’utilisation de matières thermoplastiques élastiques, le re-
cours à un scanner de grande précision, le thermoformage sous haute pression, des
auxiliaires au design unique (patins de friction). Des
setups
interactifs en 3D sont
également utilisés pour permettre à la fois l’échange avec le praticien concernant la
planification de traitement puis son approbation, mais également la réévaluation à
intervalles réguliers en cours de traitement
KEYWORDS:
CAD-CAM /
Aligner-tooth interface /
Mechanotransduction /
Aligners /
Rapid prototyping /
Friction pads
ABSTRACT –
New Concepts in Aligner Therapy with the Orthocaps Sys-
tem. Orthodontic tooth movement with aligners poses challenges peculiar to remov-
able appliances. The mechanical limitations of aligners can be overcome, to some
extent, by increasing the aligner grip on teeth as well as by choosing elastic materi-
als in their fabrication. Sound planning together with the use of auxiliaries can result
in obtaining satisfactory results for the patients who seek an aesthetically pleasing
and comfortable alternative to fixed appliance systems. The salient features of the
Orthocaps System are the use of elastic thermoplastics, precision scanning, high
pressure thermoforming, 3D interactive set-ups for treatment planning and approval,
treatment evaluation at regular intervals during treatment and a unique attachment
design (friction pads).
1. Historique
Les gouttières ont été utilisées en orthodontie de-
puis plus de 90 ans. Au tout début, elles étaient
conçues comme des positionneurs, un seul appa-
reil présentant les emplacements pour recevoir aussi
bien les dents maxillaires que les dents mandibu-
laires. Remensnyder a décrit dès 1923 un appareil
en caoutchouc à effet massant que, plus tard, il fait
* Auteur pour correspondance : wajeehkhan@orthocaps.com
breveter comme « appareil orthodontique » pour dé-
placement dentaire mineur [11].
En 1945, Kesling publie, dans l’American Journal
of Orthodontics and Oral Surgery, un article qui fait
date, intitulé « La Philosophie de l’appareil de posi-
tionnement dentaire » [4]. Dans cet article, Kesling
décrit la fabrication d’un set-up réalisé à partir d’un
moulage en plâtre dont les dents sont coupées et re-
positionnées dans de la cire sur la base du modèle. Le
« positionneur » est alors réalisé sous la forme d’un
Article publié par EDP Sciences

254 Orthod Fr 2014;85:253–264
Clinique et varia
négatif du modèle qui a été créé après reposition-
nement des dents dans la cire. Kesling fait breveter
cet appareil en 1945. Il mentionne déjà le fait que
plusieurs appareils de ce type pourraient être utili-
sés successivement pour déplacer les dents si l’éten-
due du mouvement dépassait la capacité d’un seul
appareil.
McNamara, Ponitz, Nahoum, Sheridan, Rinchuse
et d’autres auteurs ont également décrit l’utilisation
de gouttières de déplacement dentaire ayant la forme
des aligneurs d’aujourd’hui [7–9,12,13].
Tout comme l’utilisation de la CFAO est deve-
nue courante en dentisterie dans les années 1990, les
scanners numériques 3D et la technologie de proto-
typage rapide sont également utilisés pour la fabri-
cation de gouttières. Dès 1983, François Duret uti-
liselatechniquedeCFAOpourconstruiredesunités
prothétiques [2].
En 1996, des chercheurs comme Alcaniz et
Hemayed [1,3] décrivent séparément, et de façon
détaillée, l’utilisation des techniques de CFAO pour
créer des set-ups informatisés et un prototypage ra-
pide (PR) des modèles à des fins diagnostiques et
thérapeutiques en orthodontie.
En 1998, Align Technology Inc. (États-Unis)
commercialise des gouttières réalisées grâce
aux techniques de CFAO. Bien que le système
Invisalign R
soit le plus populaire, certaines sociétés
comme Clear Correct Inc. (États-Unis) et Ortho
Caps GmbH (Allemagne), ou d’autres encore,
proposent des alternatives au système Invisalign R
.
2. La biomécanique des aligneurs
La mécanotransduction (transmission de la force)
des forces orthodontiques déclenche une réaction
tissulaire qui se traduit par un déplacement den-
taire [10]. Pour les dents et les tissus environnants,
il n’y a pas de différence entre les forces générées par
les aligneurs ou par tout autre type d’appareils. La
qualité et la quantité de déplacement orthodontique
dépendent du système de force qui est utilisé, no-
tamment l’intensité de la force, sa durée, la bioméca-
nique et la réponse des tissus sous-jacents [6]. Il est
donc impératif qu’à la fois la conception de ces ap-
pareils, les propriétés du matériau thermoplastique,
mais également la qualité de l’interface entre la dent
et l’aligneur soient propices à la création d’un sys-
tème de forces qui assure un déplacement dentaire
efficace et contrôlé.
3. La conception de l’aligneur
Les aligneurs sont des appareils amovibles. Ils
présentent intrinsèquement, de ce fait, des incon-
vénients par rapport aux appareils fixes. L’inter-
face aligneur-dent est mécaniquement moins efficace
pour transmettre les forces orthodontiques aux tissus
environnants tels que l’os et le ligament desmodon-
tal. Afin de remédier à cet inconvénient, il est impor-
tant que l’aligneur soit conçu de façon à, d’une part,
présenter une bonne adhérence sur les dents, d’autre
part, créer une surface de contact maximale avec les
dents par l’adjonction de dispositifs annexes.
4. Les propriétés du matériau
thermoplastique
Il existe une grande variété de matériaux thermo-
plastiques disponibles pour la fabrication des ali-
gneurs. Ces matériaux diffèrent non seulement dans
leur composition et leur apparence, mais également
dans leurs propriétés, comme par exemple l’élasti-
cité, paramètre essentiel pour le déplacement den-
taire. Le choix du matériau dépend essentiellement
du type et de la quantité de déplacement, du ni-
veau de force requis et de l’état de santé des tissus
sous-jacents.
L’élasticité est surtout utile pour conserver la
forme initiale des aligneurs lors de l’insertion et du
retrait de l’appareil. La déformation que subissent
les aligneurs, lorsque les patients les insèrent ou les
retirent, est principalement liée à la divergence des
axes dentaires. L’élasticité est également d’une grande
importance pour la qualité du déplacement dentaire
puisque les matériaux élastiques génèrent relative-
ment moins de force à la déflection, ont un champ
d’activation et une capacité de contrôle supérieure,
présentent une meilleure adaptation par rapport aux
matériaux non élastiques.
5. L’interface dent-aligneur
Comme mentionné ci-dessus, afin de transmettre
une force le plus efficacement possible, il est im-
portant de créer une interface (zone de contact) qui
permette la transmission de la force soit : a) sans
perte d’intensité, b) sans altération de contrôle di-
rectionnel, ou sans ces deux paramètres simultané-
ment. Ceci nécessite non seulement que l’aligneur
soit parfaitement ajusté, mais également que la sur-
face des dents et des zones inter-dentaires soit re-
produite avec la plus grande précision au niveau des

KHAN W. Nouveaux concepts de traitement par aligneurs : le système Orthocaps 255
Clinique et varia
modèles utilisés pour la fabrication de gouttières. Les
aligneurs, fabriqués sur des modèles ainsi réalisés,
pourront être suffisamment ajustés aux dents pour
que l’adhérence soit bonne.
6. Le système Orthocaps
Le système Orthocaps est conçu pour résoudre
les problèmes de fond que de nombreux aligneurs
présentent, à savoir, les difficultés à transmettre une
force sans perte mécanique, sans contrôle adéquat.
Le contrôle étant la capacité de générer des forces
permettant une mobilisation précise des dents dans
les six degrés de la liberté (x,y,z- axes translation
et x,y,z- axes de rotation) dans les trois dimensions
de l’espace.
C’est pour cette raison que le système Ortho-
caps met l’accent sur l’utilisation de matériaux élas-
tiques [5]. Le système Orthocaps (TwinAligner R
)uti-
lise également deux types de gouttières (un aligneur
pour la journée et un pour la nuit) pour chacune
des étapes, et ce tout au long du traitement. Cette
technique permet de générer des forces optimales,
en sélectionnant différentes épaisseurs de matériaux
élastiques, selon le type de gouttières (de nuit ou de
journée : DayCaps / NightCaps).
Un portail internet permet aux cliniciens de sou-
mettre leurs plans de traitement, mais également de
rester en communication avec Orthocaps tout au
long du traitement. Il s’agit de la principale plate-
forme de communication entre les cliniciens et le
laboratoire.
Tous les traitements sont effectués en huit phases.
La prise d’une empreinte après l’achèvement de cha-
cune des phases de traitement est systématique, pour
mesurer l’efficacité, mais aussi pour générer un rap-
port d’évaluation de traitement pour le clinicien.
Gain d’espace
En plus du recours aux extractions, le stripping
amélaire interdentaire est régulièrement utilisé pour
permettre le nivèlement. La quantité de stripping
peut être spécifiée par le clinicien. La limite fixée
par Orthocaps est de 0,25 mm par surface den-
taire. Il a été montré par Zachrisson que cette quan-
tité de stripping n’affecte ni les dents ni les tissus
environnants [14].
Limites
Les limites de la technique sont les traitements
des décalages squelettiques de certaines rotations
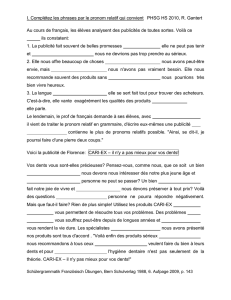
Vides
Les vides créés par le point de pression sont
contreproductifs
Figure 1
Vides créés par les points de pression.
(prémolaires et canines), car la correction d’une ro-
tation de 45 degrés, ou plus, peut nécessiter la réali-
sation de plusieurs gouttières à elle seule, rendant
le système peu adapté. L’ingression de dents anté-
rieures peut être réalisée de manière efficace, alors
que l’égression est plus difficile et nécessite l’utili-
sation de taquets de façon systématique. Le mouve-
ment de translation est possible mais est beaucoup
plus lent (plus d’étapes) qu’avec un appareil multi-
attache, rendant la technique insuffisamment effi-
cace ; la question sur le rapport coût / bénéfice doit
dans ce cas être posée.
7. La conception de l’aligneur
Pour le système Orthocaps, un ajustement « au
plus près » est d’une importance primordiale. Lors
de la conception d’un aligneur, les dispositifs an-
nexes, comme les points de pression, les encoches,
les surépaisseurs, les butées ou autres structures
comme les power ridges entre autres, utilisés par cer-
tains systèmes pour appliquer la force sur une zone
précise de la surface coronaire, nous semblent être
contre-productifs. Ces ajouts, en créant des vides
(Fig. 1) entre les dents et les gouttières, réduisent
l’adhérence des gouttières sur les dents.
La principale caractéristique de conception des
aligneurs Orthocaps est de totalement encapuchon-
ner les dents. La surface de contact, entre les dents
et la couche interne souple et plus élastique que la
coque externe plus rigide de l’aligneur, est ainsi ren-
due maximale.
Afin d’obtenir un ajustage précis de l’aligneur, un
système de balayage optique haut de gamme est uti-
lisé pour scanner les empreintes réalisées en poly-
vinyle siloxane (PVS).

256 Orthod Fr 2014;85:253–264
Clinique et varia
Figure 2
Différence de module d’élasticité des matériaux.
La capacité du processus de numérisation de
scanner, de façon minutieuse, les espaces interden-
taires, même dans des cas d’encombrement sévère
avec des dents qui se chevauchent, est absolument
essentielle. Quasiment aucun scanner intra-buccal ni
scanner dentaire bas de gamme ne permettent d’ob-
tenir une résolution suffisamment fine pour produire
des modèles avec ce degré de précision.
Les techniques de thermoformage sous haute
pression permettent au matériau de l’aligneur de
s’immiscer dans les espaces interdentaires, ce qui ac-
croît la surface de contact aligneur-dents.
8. Les matériaux thermoplastiques
L’élasticité du matériau est la propriété la plus im-
portante pour l’exécution de mouvements dentaires
contrôlés. C’est la déformation élastique des maté-
riaux de l’aligneur qui génère la force nécessaire au
déplacement. Les matériaux élastiques peuvent être
défléchis ou déformés dans une certaine mesure,
sans perdre leur forme ou leur contour initial.
Cette déformation est générée par la différence
entre la position réelle des dents du patient et celle
construite par le set-up. Si le matériau est suffi-
samment élastique, l’aligneur reprend totalement sa
forme initiale lors du retrait. Cela signifie que l’ali-
gneur reste actif et continue à délivrer ses forces tant
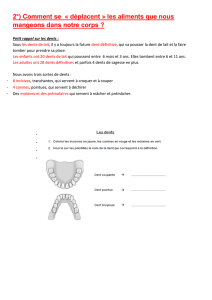
qu’il reprend sa forme de départ. À l’inverse, les ma-
tériaux non élastiques et rigides subissent une défor-
mation plastique (Fig. 2), même à des niveaux infé-
rieurs de déflection (de contrainte) ; ils perdent alors
leur forme initiale et ne sont plus en mesure de dé-
placer les dents. C’est pourquoi, dans la confection
des aligneurs, les matériaux rigides ne sont pas aussi
efficaces que les matériaux élastiques.
Sur le diagramme (Fig. 2), la contrainte est me-
surée le long de l’axe des ordonnées. Il s’agit de la
force en newtons (N) divisée par la surface en m2.
La déformation du matériau est mesurée le long de
l’axe des abscisses en pourcentage par rapport à l’état
initial au repos. La déformation linéaire est calcu-
lée comme étant l’augmentation de la longueur (∂L)
divisée par la longueur initiale (L). L’élasticité (mo-
dule d’élasticité E) d’un matériau est représentée par
la pente de la courbe ; il est calculé en divisant la
contrainte par la déformation comme indiqué dans
l’équation ci-dessous. Plier, étirer ou déformer un
matériau au-delà de sa limite d’élasticité provoque
une déformation plastique.
E=(F/A)/(∂G/L)
Il est important de comprendre que le module d’élas-
ticité est une constante du matériau qui ne dépend
pas de son épaisseur ou de sa forme. Une contrainte
sur un matériau donné se traduira par une défor-
mation permanente, quelle que soient son épaisseur
et/ou sa forme.
Le mouvement orthodontique est provoqué par
la force délivrée par le matériau élastique pour re-
prendre son état initial. Cette force est directement
proportionnelle à la surface, au module d’élasticité
et à la déformation du matériau, à la condition que
sa limite d’élasticité ne soit pas dépassée comme le
montre la figure 2.
F=AE(∂l/L)
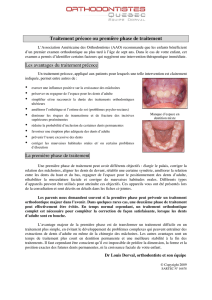
9. Les auxiliaires
De nombreux types d’auxiliaires peuvent être ad-
joints pour augmenter l’efficacité du déplacement
dentaire avec le système Orthocaps. L’utilisation de
matériaux souples et élastiques facilite également
l’utilisation de certains types d’auxiliaires qui ne
pourraient être inclus dans des matériaux rigides.
Certains de ces auxiliaires, les taquets, sont repré-
sentés sur la figure 3.
10.Lespatinsdefriction
Outre les moyens classiques, un nouveau type
d’auxiliaires est en cours d’élaboration au centre
Orthocaps en Allemagne. Ces auxiliaires dits « pa-
tins de friction » se composent d’une surface textu-
rée, de forme plate, collée sur la dent, afin d’accroître

KHAN W. Nouveaux concepts de traitement par aligneurs : le système Orthocaps 257
Clinique et varia
Standard Egression Redressement Rotation
Figure 3
Différents types de taquets.
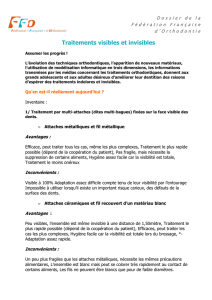
Figure 4
Modèle CFAO avec grilles de friction sur deux dents.
a b
Figure 5
(a) Dents sans patins, (b) dents avec patins. Quasi invisibilité des patins de friction collés sur les dents.
la friction entre la face interne de l’aligneur et la dent.
L’avantage d’utiliser des « patins de friction » est que
ces surfaces texturées sont seulement d’une fraction
de millimètre d’épaisseur, ce qui les rend pratique-
ment invisibles donc plus acceptables pour les pa-
tients. La figure 4montre le modèle CFAO avec des
patins de friction sur deux dents.
Les taquets ou les patins de friction sont collés
sur les dents par collage indirect.
Ils sont inclus dans le premier aligneur envoyé
au clinicien ; ils sont ainsi prêts pour être collés en
méthode indirecte. La figure 5montre les patins de
friction placés sur plusieurs dents. Comme on peut
le noter, ces patins de friction sont quasi invisibles.
Ce type d’auxiliaire est bien plus acceptable pour les
patients qui sont en quête de traitement invisible que
les autres.
11. Présentation de cas
11.1. Cas n◦1
Cette patiente de 33 ans présentant une béance
antérieure et une endoalvéolie maxillaire a été traitée
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%