Présentation traitement numérique

5 juin 2002
Franz Dettling Avignon BTS_IRIS_Traitement_numérique_du_signal
I.Introduction
1. Rappels
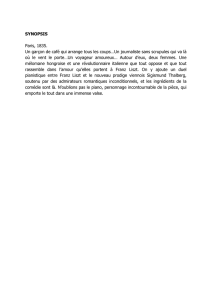
•Une chaîne numérique est constituée des éléments suivants:
•Les fonction d’échantillonnage et du CAN sont supposées déjà
étudiées
•Le thème de la présentation s’étend dans le rectangle de droite ,il
comprend l’étude de la transformation des échantillons numériques
{xn} d’entrée par un calculateur en une autre suite d’échantillons
numériques {yn}
{xn} {yn}

5 juin 2002
Franz Dettling Avignon BTS_IRIS_Traitement_numérique_du_signal
I.Introduction
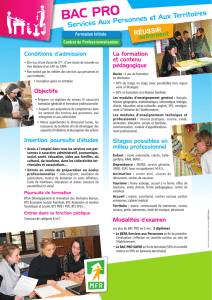
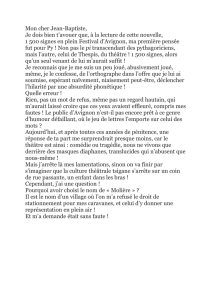
2. Série d’échantillons numériques d’entrée {xn}
• Les échantillons sont une suite de nombres représentant l’évolution
du signal analogique d’entrée,
{xn}
-60
-40
-20
0
20
40
60
80
010 20 30 40 50
N° d'échantillon
Valeur
numérique
quantifiée
•la valeur des échantillons est quantifiée non continuité en ordonnée
•On a supprimé la référence temporelle, les échantillons d’entrée sont
représentés par leur numéros d’ordre, on note cette suite {xn} , la lettre x
pour désigner les échantillons d’entrée et n pour le numéro d’ordre
non continuité en abscisse
•Si on se place en « temps réel » , on désire obtenir une suite
d’échantillons de sortie{yn} au même rythme qu’on a obtenu la suite
{xn}

5 juin 2002
Franz Dettling Avignon BTS_IRIS_Traitement_numérique_du_signal
I.Introduction
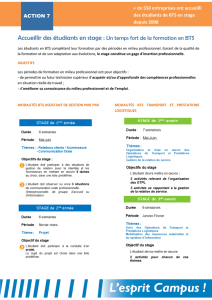
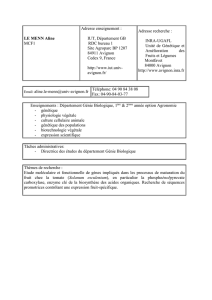
3. Architecture d’un processeur numérique
Le schéma fonctionnel d’un calculateur numérique (DSP)
Le processeur possède des
instructions spécifiques et
spécialisées (RISC)
La vitesse de traitement
(30 à 2000 MIPS) est très
grande
Traitement parallèle
(pipeline) avec des
instructions complexes à 1
seul coup d’horloge
Utilisation de nombreux
BUS
horloge PROCESSEUR
NUMERIQUE
(DSP)
Multiplieur
Unité arithmétique
ROM et ev. RAM rapide
Mémoire
Principale (RAM)
Mémoire
cache
Port E/S
// ou série
{yn} {xn}
•RAM rapide
•RAM externe

5 juin 2002
Franz Dettling Avignon BTS_IRIS_Traitement_numérique_du_signal
I.Introduction
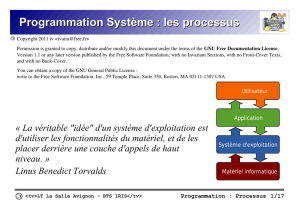
4. Systèmes numériques linéaires
•Propriétés essentielles
Additivité :
La réponse de la
somme est la somme
des réponses

5 juin 2002
Franz Dettling Avignon BTS_IRIS_Traitement_numérique_du_signal
I.Introduction
4. Systèmes numériques linéaires
•Propriétés essentielles :
Homogénéïté :
La réponse est affectée du
même facteur multiplicatif
que l’entrée
Invariance par Translation:
La réponse est décalée du
même nombre de pas (s)
que l’entrée
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%