Cours de « système d`exploitation

Cours de :
« système d'exploitation »

Plan
1. Présentation générale des systèmes d'exploitations
2. Généralités sur UNIX
3. Les bases du système
4. Les langages de commande (Shell)
5. Le langage « C » (avancé) et UNIX
6. Le système de fichiers, représentation interne
7. Les processus : concepts avancés

Présentation générale des
systèmes d'exploitation

Deux catégories de logiciels :
1. Les programmes systèmes pour le fonctionnement des
ordinateurs.
2. les programmes d'application qui résolvent les
problèmes des utilisateurs.
•Deux modes de fonctionnement :
1. Le mode noyau ou superviseur
2. le mode utilisateur (compilateur, éditeur,
programmes utilisateurs ...).
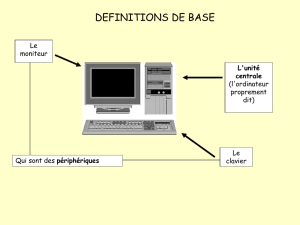
Introduction

•Un ordinateur contient :
1. Un ou plusieurs processeurs,
2. une mémoire principale,
3. des horloges,
4. des disques,
5. des interfaces de connexion à des réseaux et
6. des périphériques d'entrées/sorties.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%