ppt - GdR Robotique

HAPTION : Virtual Touch
Fabricant de périphériques
à retour d’effort

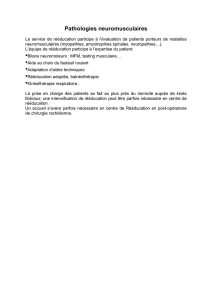
Produits (1/3)
Nucléaire:
Postes de
Téléopération
Virtuose
6D40-40
Réalité virtuelle:
Salles immersives
Virtuose
6D35-45
Industrie:
Bureaux
d’études
Virtuose
6D Desktop
Médical:
Laboratoires de
recherche
Virtuose
3D15-25
Interfaces haptiques

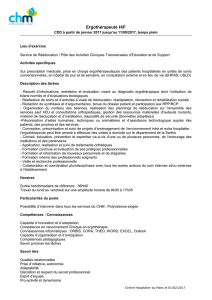
Produits (2/3)
Réalité virtuelle:
Salles immersives
INCA 6D

Produits (3/3)
Vortex™
(CMLabs Simulations Inc.)
I-Fitting for CATIA V5
(partenaire
Dassault Systemes)
Logiciels
Interactive Physique Pack
pour Virtools

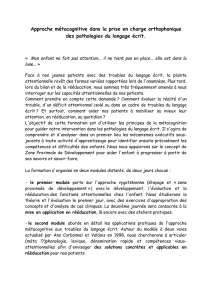
Techniques de Réalité Virtuelle utilisées
pour la rééducation
Rééducation des membres
supérieurs
Simuler des gammes d’exercice
basés sur les jeux
Permettre la répétition des
exercices tout en maintenant une
forte motivation du patient
Utilisation des modes robotiques :
–Passif (mode robot)
–Actif aidé (mode accompagnant les
mouvements du patient)
–Actif (mode dans lequel le patient en
moteur)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%