Depart-moteur 2003

Merlin Gerin Square D Telemecanique
Départs moteur
Electromécaniques
1

2
FORMATION / Décembre 96
SOMMAIRE
1 Structure d'un départ moteur
2 Norme IEC 947
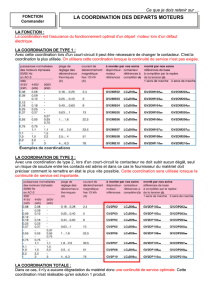
3 Coordination des protections
4 Les composants du départ moteur
5 Les solutions départ moteur

3
FORMATION / Décembre 96
1 - Structure générale d'un départ moteur

4
FORMATION / Décembre 96
Objectif d'un départ moteur
Démarrer et arrêter un moteur
Protection de l'appareillage contre les défauts électriques
Assurer la sécurité du personnel
Optimiser la continuité de service

5
FORMATION / Décembre 96
Départ moteur : 5 fonctions élémentaires
Isoler l'appareillage de l'alimentation
Protection contre les dommages causés par
les courants de court circuit
Protection du moteur contre les effets des
courants de surcharge
Etablir et couper le courant en charge
Sectionnement
Sect. en charge
Protection
court-circuit
Protection
surcharge
Commande
puissance
Isoler l'appareillage de l'alimentation en
fonctionment
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
1
/
61
100%