Aucun titre de diapositive



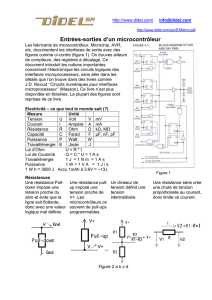
L’évolution des produits
domestiques (ou industriels) rend
compte d ’un phénomène
directement lié à l ’évolution des
technologies:
Evolution technologique

Miniaturisation
Intégration
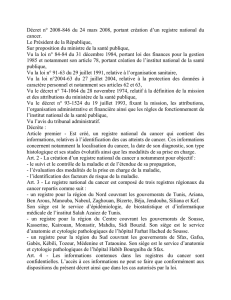
•Progrès de la miniaturisation.
Les téléphones portables en sont
un exemple très actuel.
•Progrès de l’intégration.
Le nombre de structures
intégrées à un seul composant
est de plus en plus important.
Le nombre de circuits utilisés
est ainsi réduit.
Mais cette miniaturisation ne
peut se faire sans une évolution
de la technologie utilisée.
Evolution technologique

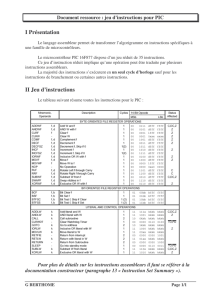
On comprendra aisément qu ’un
système microprogrammé tel
que le téléphone portable ne
peut être géré par un système
minimum à microprocesseur
6809:trop encombrant!
La solution est alors de
remplacer le système minimum
par un seul circuit:
Le microcontrôleur.
Système minimum à 6809:
•Microprocesseur
•RAM
•EPROM
•PIA
•Décodeur
5 circuits différents!!!
Solution:
•Microcontrôleur
1 seul circuit!!!
Evolution technologique
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
1
/
65
100%