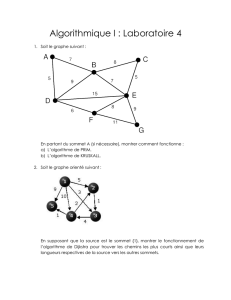
Chapitre 1

IFT-66975
Chapitre 1
Classes de complexité fondamentales:
P, BPP, RP, co-RP, ZPP, NP, co-NP, PP

Quatre exemples
1- Problème du tri
Entrée: une liste d’entiers a1, …, an
Sortie: Cette liste triée en ordre croissant.

Algorithme classiquement utilisé:
Quicksort: « entrée a1, …, an
1. Comparer tous les entiers au pivot a1
pour obtenir les ensembles P et G des
airespectivement plus petits et plus
grands que a1.
2. Retourner la liste Quicksort(P), a1,
Quicksort(G). »

Problème classique de l’analyse de
Quicksort: sur une liste d’entrée
aléatoire, Quicksort nécessite (n log n)
comparaisons mais si la liste d’entrée
est triée, le nombre de comparaisons
est (n2).
Solution: exécuter l’algorithme sur une
permutation aléatoire de la liste
d’entrée ou choisir les pivots de façon
aléatoire. Alors l’espérance du temps
d’exécution est (n log n).

2- Problème du test de nullité d’un polynôme
sur un corps fini.
Entrée: Un polynôme p(x1, …, xn)
factorisé a plusieurs variables sur un
corps fini F(par exemple, les entiers
modulo un nombre premier q, Zq).
Question: Ce polynôme est-il égal au
polynôme nul lorsque développé?
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%