ESD 2210

Modifié le mardi 13 octobre 2009
Huegli Tech France www.huegli-tech-france.fr
1
60110 Méru
ESD 2210
Régulateur de vitesse électronique
PTI 1041 FR
Références disponibles :
ESD 2210-12
ESD 2210-24

Modifié le mardi 13 octobre 2009
Huegli Tech France www.huegli-tech-france.fr
2
60110 Méru
INTRODUCTION
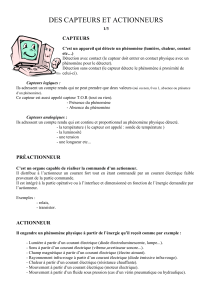
Le boîtier de contrôle ESD-2210, est une unité
entièrement électronique, conçu pour contrôler la
vitesse d'un moteur avec une réponse rapide et
précise aux variations de charges transitoires. La
boucle de contrôle fermée associé à un actionneur
électrique proportionnel et un capteur magnétique
de vitesse contrôlera une large gamme de moteurs
en mode isochrone.
Le boîtier est d'une très grande fiabilité et
robustement construit pour supporter
l'environnement moteur.
La simplicité d'installation et des réglages sont
inhérents à la conception de base du produit. Deux
contrôles de performances non interactifs
permettent d'obtenir une réponse optimale du
système.
Les autres caractéristiques incluses sont la
protection contre les inversions de polarité de la
batterie et les transitoires de tension, un circuit de
sécurité en cas de perte de signal capteur ou
d'alimentation batterie.
DESCRIPTION
L'information de vitesse est généralement produite
par un capteur magnétique. Tout autre signal peut
être utilisé sous réserve que la fréquence produite
soit proportionnelle à la vitesse du moteur et
corresponde en tension et fréquence aux
spécifications du boîtier.
Le capteur est généralement monté à proximité
d'une roue phonique qui dans la grande majorité des
cas est la couronne dentée du volant moteur.
Lorsqu'une dent défile devant le capteur un signal
est généré proportionnellement à la vitesse du
moteur.
L'intensité du signal doit correspondre à la gamme
d'entrée de l'amplificateur du boîtier. Une amplitude
de 0.25 à 50 volts c.a efficace est nécessaire pour
permettre au boîtier de fonctionner suivant les
spécifications. Le signal capteur est appliqué aux
bornes C et D du boîtier. Entre ces bornes, il y a une
indépendance de plus de 5 K ohms. La borne D est
connecté internement à la borne F qui est le pôle
négatif de la batterie. Le blindage du câble utilisé
sera relié uniquement à la borne prévue et isolé côté
capteur. Voir schéma de la figure 1.
Lorsque le signal est reçu par le boîtier, ce dernier
est amplifié et remis en forme par un circuit interne
pour fournir un signal de vitesse analogique. Si le
boîtier ne détecte aucun signal en provenance du
capteur alors le circuit de sortie du boîtier coupera
l'alimentation de l'actionneur.
Un circuit de comparaison reçoit le signal du capteur
ainsi que celui produit par l'oscillateur interne
préréglé à la vitesse de régulation souhaitée. Le
réglage interne de vitesse à un rapport de 7 à 1 et il
est réglé par un potentiomètre 25 tours. La sortie du
circuit de comparaison est relié à l'entrée du circuit
de contrôle dynamique. Ce circuit comporte les
réglages de gain et de la stabilité qui procurent un
fonctionnement isochrone et stable pour la majorité
des moteurs et systèmes de carburant (injection ou
carburateur).
Le circuit dynamique de sortie est influencé par le
réglage de gain et de la stabilité. La sensibilité est
augmentée lorsque l'on tourne le réglage de gain
dans le sens horaire. Ce réglage à une gamme non
linéaire de 33 à 1. Le réglage de stabilité lorsqu'il est
tourné dans le sens horaire augmente le temps de
réponse du système pour s’adapter à une plus large
gamme de constante de temps des moteurs. Etant
donné que le système est basé sur le principe P.I.D
la portion dérivatrice D peut être modifié si
nécessaire. (voir la section instabilité).
Pendant la période de démarrage l'actionneur se
déplace à sa position maximale et restera dans cette
position jusqu'à la mise en route et la montée en
régime. Lorsque le moteur tourne avec une charge
constante l'actionneur est alimenté avec un courant
suffisant pour maintenir la vitesse nominale.
Le circuit dynamique de sortie génère un courant
découpé à une fréquence de 500 hz pour alimenter
l'actionneur. La fréquence de découpage est bien
au-delà de la fréquence naturelle de l'actionneur et
ne permet pas de voir un déplacement quelconque
de l'arbre de l'actionneur. Le découpage du courant
du transistor de sortie réduit sa dissipation de
puissance interne avec un contrôle plus efficace.
Le circuit de sortie peut produire un courant jusqu'à
10 ampères continus à 25° c pour les systèmes 12
et 24 volts. L'actionneur répond à la moyenne du
courant pour positionner le levier de contrôle de
carburant. Le boîtier ESD 2210 est muni de
caractéristiques particulières qui améliorent le
système de régulation. Un circuit d'anticipation réduit
la survitesse durant la période de montée en régime
lors du démarrage ou bien lors d'importantes
transitoires de charge

Modifié le mardi 13 octobre 2009
Huegli Tech France www.huegli-tech-france.fr
3
60110 Méru
SPECIFICATIONS
PERFORMANCES
Mode isochrone/stabilité en régime +/- 0.25% ou moins
Gamme de vitesse en fréquence capteur 1 khz - 7.5 khz
Dérive en température +/- 1% maxi
Réglage de vitesse fin (potentiomètre externe) +/- 250 hz
Sensibilité de la borne A 130 hz +/- 15 hz/volts @ impédance 5,1 K
ENVIRONNEMENT
Température de fonctionnement (ambiance) -40° c à +85° c
Humidité relative jusqu'à 100 %
Boîtier anti-corrosion/fongicide
ALIMENTATION
Batterie 8 à 20 volts pour alimentation 12 Vcc
16 à 32 volts pour alimentation 24 Vcc
Polarité Négatif à la masse (boîtier isolé)
Consommation (boîtier seulement) 60 m.a continu
Intensité maximale actionneur à 25°C 10 ampères continus
Signal capteur magnétique 0.5 - 50 volts efficaces
FIABILITE
Vibrations 5 G de 20 - 500 hz
Essais 100% toutes fonctions
PHYSIQUE
Dimensions voir figure 1
Poids 345 grammes
Montage Toutes positions (préférence vertical)
* Protection contre inversion de polarité par diode en parallèle. Un fusible de 15 ampères devra être installé
coté pôle positif de la batterie.
APPLICATION ET INSTALLATION
Le boitier ESD 2210 enrobé par une résine époxy rigide est robustement, construit pour supporter
l’environnement moteur. L’unité peut être installée dans une armoire de contrôle ou dans un coffret situé sur
le moteur contenant l’instrumentation de contrôle. Eviter toute température excessive.
ATTENTION
Un dispositif de survitesse indépendant du système
de régulation de vitesse devra être installé pour éviter
la perte de contrôle du moteur pouvant entraîner de
graves dommages corporels ou matériels.

Modifié le mardi 13 octobre 2009
Huegli Tech France www.huegli-tech-france.fr
4
60110 Méru
CABLAGE
Les connections de base sont illustrés dans le
diagramme 1. La section du câblage entre batterie,
actionneur allant aux bornes E-F-G-H sera au
minimum de 1.5 mm2 ou plus si nécessaire. Des
câblages très longs nécessiteront une augmentation
de section pour réduire les chutes de tension.
Protéger l'entrée positive de la borne E par un
fusible de 15 ampères.
Les câbles entre le capteur magnétique et les
bornes C-D doivent être torsadés ou de préférence
blindés sur toutes les longueurs. Le blindage sera
isolé coté capteur et relié uniquement à la borne
prévue qui figure sur le schéma 1. Le blindage sera
lui même isolé pour éviter que sur son parcours il ne
puisse rentrer en contact avec la masse du moteur.
Avec le moteur à l'arrêt régler le jeu entre le capteur
et la denture extérieure de la couronne dentée. Le
jeu ne doit pas être inférieur à 0.45 mm. En général
en dévissant le capteur de 3/4 de tour après avoir
été en contact avec une dent l'on obtiendra une
entrefer correct. La tension délivrée par le capteur
pendant la période de démarrage ne doit pas être
inférieur à 1 volt efficace.
REGLAGES
Avant le démarrage du moteur
Positionner les réglages de gain et stabilité à mi-course ainsi que le potentiomètre externe de réglage fin s'il
est utilisé.
Démarrage du moteur
Le boîtier est réglé en usine approximativement pour un ralenti, soit 1000 hz de fréquence capteur.
Démarrer le moteur avec le système de régulation sous tension batterie. L'actionneur se positionnera au
maxi de sa course pendant cette période. La régulation doit alors contrôler le moteur à une vitesse basse. Si
le moteur est instable après le démarrage tourner le gain et la stabilité dans le sens anti-horaire jusqu'à
obtention d'un régime stable.
Réglage de la vitesse nominale
L'augmentation de vitesse est obtenue en tournant le potentiomètre de réglage (speed) dans le sens horaire.
Une commande à distance par potentiomètre (5 K ohms) du réglage fin de la vitesse est réalisable. Se
reporter au diagramme 1.
Réglage des performances
Après réglage de la vitesse nominale à vide procéder aux opérations suivantes :
A- Tourner le réglage de gain dans le sens horaire jusqu'à obtention d'instabilité ou pompage. Revenir
lentement dans le sens anti-horaire jusqu'à disparition de l'instabilité puis à partir de ce point diminuer le
réglage d’une division pour assurer une bonne stabilité.
B- Régler la stabilité en opérant comme pour le gain.
Gain et stabilité peuvent nécessiter de légères retouches lorsque la charge sera appliquée. Normalement les
réglages effectués sans charge donnent des résultats satisfaisants. Un enregistreur peut être utilisé pour
affiner ces réglages. Si une instabilité ne peut être éliminée se reporter à la section concernant la recherche
des pannes.

Modifié le mardi 13 octobre 2009
Huegli Tech France www.huegli-tech-france.fr
5
60110 Méru
RECHERCHE DE PANNES
Moteur à l'arrêt et avec la régulation sous tension
Si la régulation ne fonctionne pas le défaut peut être localisé en vérifiant la tension comme indiqué aux
étapes 1-2-3-4. Les points (+) et (-) se référent à la polarité du contrôleur ou du multimètre. (voir le
bulletin des actionneurs pour le détail des tests).
BORNES VALEUR NORMALE
CAUSES PROBABLES
1- E (+) & F(-) Batterie 12 ou 24 v 1- Batterie débranchée. Fusible défectueux
2- Tension batterie trop faible
3- Erreur de câblage
2- A (+) & B(-) 0 - 3,9 vcc
7,1 - 7,9 vcc 1- Potentiomètre en court circuit ou mal câblé
2- Boîtier défectueux
3- C (+) & D(-) 1 volt efficace
au démarrage 1- Jeu trop important entre capteur et denture de la
couronne. Contrôler
2- câblage erroné ou défectueux du capteur
Indépendance entre C & D doit être entre 300 et 1200
ohms
3- Capteur défectueux
4- E (+) & H(-) 0,8 à 1.5 volts
(démarrage) 1- Câblage erroné actionneur
2- Régulateur défectueux
3- Actionneur défectueux
PERFORMANCES INSUFFISANTES
Si la régulation fonctionne anormalement procéder aux tests suivants :
SYMPTOMES TEST CAUSES PROBABLES
Survitesse moteur 1 - Ne pas démarrer le moteur mais
appliquer la tension au système de
régulation de Vitesse
2 - Maintenir manuellement le
régime de moteur à la vitesse
souhaitée. Mesurer la tension entre
les bornes E(+) et H(-) du
régulateur de vitesse.
1 - L’actionneur est en position de
pleine accélération. Alors débrancher
les bornes capteurs C et D. Si la
position est inchangée alors le boitier
de vitesse est défectueux.
Si l’actionneur est en position mini
de carburant alors vérifier le capteur.
1 - Si la lecture de la tension est de 1 à
1.5 volts cc.
a - Le réglage de la vitesse est situé au
dessus du régime nominal, tourner le
potentiomètre de vitesse dans le sens
anti-horaire.
b - Régulateur de vitesse défectueux.
2 - Si la tension est supérieure à 1.5
Volts. Contrôler l’actionneur.
3 - La consigne du système de coupure
de survitesse est ajusté trop bas.
4 - Si la tension est inférieure à 0,8 volts
Régulateur de vitesse défectueux
Actionneur pas
alimenté pleinement
lors du démarrage
1 Mesurer la tension entre les
bornes
E(+) et H(-) sur le régulateur de
vitesse.
Elle doit être de 0,8 à 1,5 volts cc
sinon :
1 Remplacer la batterie.
2 Câblage actionneur incorrect
3 Régime ajusté trop haut si la tension
est supérieure à 1,5 volts
 6
7
6
7
1
/
7
100%