Conception de systèmes hétérogènes en Génie Électrique

Chapitre 5
es algorithmes évolutionnaires
multicritères à la conception de véhicules
électriques
Dans ce chapitre, nous entreprenons véritablem ique par optimisation de
véhicules électriques purs à s évolutionnaires multicritères. La forte
complexité de ce dispositif et son caractère hétérogène et multidisciplinaire en font une
application appropriée à notre démarche.
La conception d’un véhicule électrique est naturellement très complexe. Aboutir à un véhicule
« optimisé » satisfaisant une m ite de faire un certain nombre de choix en
terme d’architecture, de dimensionnem breuses possibilités
sont offertes au concepteur qu opter pour un certain type de motorisation
(électrique pure, hybride), de tr e (boîte de vitesses, réducteur fixe, solutions
multimoteurs,…) ou de sources d’énergie (pile à combustible, batterie, super-capacité,…).
Comment dimensionner les diff oteur de traction, réducteur, source
d’énergie) et commander l’ensemble pour gérer au mieux la consommation du véhicule ? Nous
ons b x sont couplés et qu’ils vont intervenir de manière forte
LEEI sur la
conception d’un véhicule électrique, de confronter, sur un même problème, l’algorithme NSGA-
trique
Application d
ent la conception systém
l’aide des algorithme
ission donnée nécess
ent et de gestion de l’énergie. De nom
i peut par exemple
ansmission mécaniqu
érents organes du véhicule (m
percev ien à quel point tous ces choi
dans les performances finales du véhicule.
Dans un premier temps, nous proposons, sur la base de travaux antérieurs réalisés au
II avec une méthode géomé déterministe (Hooke and Jeeves). Le but de cette étude est de
comparer, sur un exemple concret, les différences entre les deux approches en terme de
formulation mathématique et de performance.
Nous présentons ensuite le système « véhicule électrique » tel que nous l’avons modélisé
(variables de conception, critères, contraintes). Puis, à l’aide de ce modèle, nous montrons, sur
deux missions de circulation différentes, comment la prise en compte de la finalité du système
influe sur la conception des différents sous-systèmes composant le véhicule.
149

Chapitre 5
5.1 Confrontation de méthodes
Pour commencer ce chapitre, nous proposons, dans le contexte de la conception systémique par
optimisation, de confronter les algorithmes évolutionnaires multicritères à des méthodes de type
géométriques. Dans des travaux antérieurs, menés dans le groupe Système du LEEI, Y.
Ferfermann avait déjà abordé une démarche de conception par optimisation sur un véhicule
électrique, mais en utilisant des méthodes directes géométriques, en l’occurrence l’algorithme de
Hooke end Jeeves, basé sur le principe de l’agrégation des critères partiels en une fonction coût
nique [Fef02].
efermann mais avec le NSGA-
.
Une co
convergence ne saurait suffire à conclure sur la supériorité absolue d’une des méthodes. La
omplexité de mise en œuvre est par exemple un aspect important de la conception. L’objectif ici
est
princip tra également de
onfronter une méthode déterministe et une méthode stochastique, à laquelle il est souvent
e système d’étude se compose d’une chaîne de traction type véhicule électrique pur,
com s en s rie ou en parallèle, un filtre
’entrée comportant une capacité et une inductance, un convertisseur statique de type onduleur
Les variables de conception du problème constituant le vecteur objet sont présentées dans le
tableau 5.1. Les paramètres circuits du moteur sont calculés analytiquement à partir des
paramètres géom de » défini dans
[Fef02].
u
Nous avons déjà évoqué, dans le chapitre 2, les principales différences entre les méthodes
d’optimisation de type agrégatives et celles de type Pareto. Afin de pouvoir plus précisément
confronter ces deux types d’algorithmes sur un problème concret du Génie Électrique, nous
proposons de résoudre le même problème d’optimisation que Y. F
II
mparaison brute de ces deux algorithmes par rapport aux performances en terme de
c de les appliquer à la résolution d’un problème d’optimisation complexe et d’en comparer les
es d’application et la qualité des résultats. Cette approche permet
c
reprochée son caractère aléatoire. Aucune analyse au sens système du terme ne sera menée sur
cet exemple, l’objectif étant uniquement de se concentrer sur les caractéristiques et les
performances des méthodes.
5.1.1 Description du problème
Lportant un ensemble d’accumulateurs pouvant être associé é
d
de tension, une machine à force électromotrice de forme trapézoïdale et un réducteur mécanique.
Tous les détails concernant la modélisation, les critères et contraintes associés au système
peuvent être trouvés dans [Fef02].
X
étriques ( S
r,R
l) selon un « modèle de synthèse par similitu
150

Application des algorithmes évolutionnaires multicritères à la conception de véhicules électriques
TABLEAU 5.1 : VARIABLES DE CONCEPTION DU PROBLEME D’OPTIMISATION
E
niveau de la tension continue d’alimentation (V)
CVS
f
fréquence de commutation des semi-conducteurs (kHz)
S
r rayon d’alésage de la machine (m)
R
l longueur de la machine (m)
f
C capacité du filtre d’entrée (F)
f
L inductance du filtre d’entrée (H)
Les objectifs du problèmes sont la minimisation
, m ompo
insi que la masse de la plate-forme à vide du véhicule
du critère , qui représente les pertes totales du système, regroupant les pertes Joule,
fer et mécaniques du moteur, les pertes dans la batterie, dans le filtre, ainsi que les pertes
du convertisseur statique
Les co
:
du critère (
1XFasse totale du véhicule, qui c rte la masse de la batterie de
traction, la masse de l’actionneur, a
)
)(
2XF
ntraintes sont relatives :
aux domaines de variation des paramètres d’optimisation
aux domaines de variation des paramètres du modèle de simulation
aux domaines de fonctionnement du dispositif (contrainte thermique, limite
d’alimentation, …)
aux conditions d’adéquation entre la commande et les paramètres du filtre d’entrée
(ondulations, découplage, stabilité)
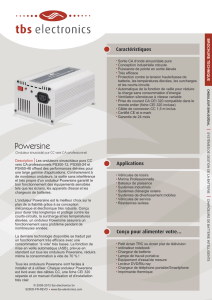
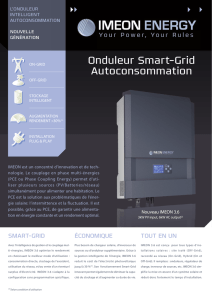
La figure 5.1 présente le synopsis de la boucle d’optimisation – simulation du problème.
151

Chapitre 5
C es Chargesahier d
Machine
Synchrone à
Aimants
Alimentation
Cde
Cde
Charge
C es Charges
Similitude
Modèles Comportementaux
ahier d
Modèle de
Synthèse par
Modèles Comportementaux
Critères d ’optimisation et
OPTIMISEUR
contraintes
Méthodes
Directes
lticritère
Onduleur
Mu
Variables de
conception Paramètres
circuits
eves
La méthode de Hooke and Jeeves est une méthode géométrique directe d’optimisation (sans
calcul des dérivées des contraintes et des critères). Elle comporte deux étapes principales qui
sont la recherche de la direction de descente et le déplacement dans cette direction. A partir d’un
point initial ou point de référence, l’algorithme effectue une recherche exploratoire par
les autres variables restant fixes. Si le coût de la
fonction à optimiser est meilleur, alors cette nouvelle composante est conservée. Dans le cas
con
figure 5.1 : Synoptique de la boucle simulation-optimisation
5.1.2 Utilisation de la méthode de Hooke and Je
perturbation d’un incrément + i
∆ d’une variable,
traire, la variable est perturbée en - i
∆
et con servée en cas d’amélioration de la fonction
bjectif. Si les deux incrém élioration, la composante reste inchangée. o ents n’apportent aucune am
A la fin du processus, toutes les composantes ont été perturbées une fois, et nous obtenons soit
un point pour lequel la fonction coût a été améliorée, soit le point de référence lui-même. Dans
ce dernier cas, le processus est réitéré avec un pas i
∆
plus petit (typiquement 2/
i
∆). Dans le
cas contraire, le point obtenu et le point de référence sont utilisés pour définir une nouvelle
direction de recherche par extrapolation. Un déplacement peut alors être effectué le long de cette
direction. Le nouveau point ainsi obtenu devient le point de référence. La procédure est en
général stoppée lorsque les incréments i
∆
deviennent inférieurs à une précision donnée vis à vis
des divers paramètres.
FORMULATION DU PROBLEME D’OPTIMISATION
La formulation du problème résultant de l’approche adoptée par Y. Fefermann est la suivante :
152

Application des algorithmes évolutionnaires multicritères à la conception de véhicules électriques
contrainte
*
21
*
,...,2,1 0)( scontrainte aux soumise et
)()(F )(F ),(
assurant un Trouver
rS
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎨
solution e
Njg
Hrrmin F
C
l
E
j
kPERTESMASSEk
f
R
=∀≤
+><+><=
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎫
⎪
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎧
=
X
XXXX
X
αα
(5.1)
fCVS ⎪
⎪
Lf⎪
⎪
⎪
⎪
⎪
et
MASSE
α
PERTES
α
représentent les coefficients de pondération associés à chacun des critères.
)(XF e
1t )(X représentent respectivement les
2
F critères normalisés concernant la masse et les
pertes globales du système. La fonction est une fonction de pénalité dont le rôle est de
icient
contrainte
1
N
j
)(XH
détériorer le coût de la fonction objectif en cas de non respect des contraintes. Son expression
générale est rappelée par l’équation (5.2). Le paramètre k
r représente le coeff de pénalité.
[]
∑
=)( )( j
gPH XX avec
=
(
)
2 ] ,0] )( [ X
j
gP [ max X
j
g
=
(5.2)
ous lui la procédure de recombinaison auto-
adaptative décrite dans ce même chapitre.
5.1.3.1 Formulation du problème
te mul
5.1.3 Utilisation du NSGA-II
Le NSGA-II est décrit au chapitre 3. N avons associé
Dans le contex ticritère, la formulation du problème d’optimisation devient :
153
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
1
/
158
100%