Mécanique des fluides

1
Mécanique des fluides
Promotion IGE
Philippe Fichou
2001-2002

CHAPITRE 1. GÉNÉRALITÉS - ÉQUATIONS GÉNÉRALES 2
Chapitre 1
Généralités - Équations générales
Ce chapitre est consacré à des rappels et des compléments de mécanique des milieux continus (MMC)
applicables à la mécanique des fluides, ainsi qu’aux équations et théorèmes qui en résultent.
L’hypothèse fondamentale de la MMC est la continuité du milieu caractérisée par l’emploi de fonctions
représentant le modèle, supposées continues dans les domaines auxquelles elles s’appliquent.
1.1 Généralités
1.1.1 Théorèmes généraux
Le modèle de la mécanique des fluides utilise fréquemment les opérateurs vectoriels et tensoriels. Rappe-
lons ici leurs définitions et les théorèmes les plus employés sans démonstration.
1.1.1.1 Définitions des opérateurs vectoriels et tensoriels
Les différentes définitions seront données dans les bases cartésiennes (e1,e2,e3), cylindrique (er,eθ,ez)et
sphérique (er,eθ,eϕ).
Remarques : Nous utiliserons la convention d’Einstein pour l’indice muet, c’est-à-dire que les indices
répétés dans un même monôme signifient une sommation de 1 à 3.
La dérivée par rapport à un axe du repère est notée indifféremment ∂iou ,i.
– Le vecteur gradient d’une fonction scalaire
gradf=f,iei(1.1)
=f,rer+f,θ
reθ+f,zez(1.2)
=f,rer+f,θ
reθ+f,ϕ
rsin θeϕ(1.3)
– Le scalaire laplacien d’une fonction scalaire
∆f=f,ii (1.4)
=1
r(rf,r),r+1
r2f,θθ +f,zz (1.5)
=f,rr +1
r2f,θθ +1
r2sin2θf,ϕϕ +2
rf,r+cos θ
r2sin θf,θ(1.6)
– Le scalaire divergence d’une fonction vectorielle
divF=Fi,i(1.7)
=Fr
r+Fr,r+Fθ,θ
r+Fz,z(1.8)
=Fr,r+1
rFθ,θ+1
rsin θFϕ,ϕ+2
rFr+cot θ
rFθ(1.9)

1.1. GÉNÉRALITÉS 3
– Le vecteur rotationnel d’une fonction vectorielle
rotF =εijkFk,jei(1.10)
= (1
rFz,θ−Fθ,z)er+ (Fr,z−Fz,r)eθ+1
r[(rFθ),r−Fr,θ]ez(1.11)
= (1
rFϕ,θ−1
rsin θFθ,ϕ+cot θ
rFϕ)er+ ( 1
rsin θFr,ϕ−Fϕ,r−1
rFϕ)eθ
+(Fθ,r−1
rFr,θ+1
rFθ)eϕ(1.12)
– Le vecteur divergence d’un tenseur du second ordre symétrique
div(F) = Fij ,jei(1.13)
= [Frr ,r+Frθ,θ
r+Frz ,z+Frr −Fθθ
r]er+ [Fθr ,r+Fθθ
r+Fθz ,z+ 2Frθ
r]eθ
+[Fzr ,r+Fzθ
r+Fzz ,z +Fzr
r]ez(1.14)
= [∂Frr
∂r +∂Frθ
r∂θ +1
rsin θ
∂Frϕ
∂ϕ + ( 2
rFrr −Fθθ −Fϕϕ) + cot θ
rFrθ ]er
+[∂Fθr
∂r +∂Fθθ
r∂θ +1
rsin θ
∂Fθϕ
∂ϕ +3
rFrθ +cot θ
r(Fθθ −Fϕϕ)]eθ
+[∂Fϕr
∂r +∂Fϕθ
r∂θ +1
rsin θ
∂Fϕϕ
∂ϕ +3
rFrϕ + 2 cot θ
tFϕθ]eϕ(1.15)
– Le tenseur gradient d’une fonction vectorielle
gradF=Fi,jei⊗ej(1.16)
=
Fr,r(Fr,θ−Fθ)
rFr,z
Fθ,r(Fθ,θ+Fr)
rFθ,z
Fz,rFz,θ
rFz,z
(1.17)
=
Fr,rFr,θ−Fθ
r
Fr,ϕ
rsin θ+Fϕ
r
Fθ,r(Fθ,θ+Fr)
r
Fθ,ϕ
rsin θ−Fϕcot θ
r
Fϕ,rFϕ,θ
r
Fϕ,ϕ
rsin θ+Fr
r+Fθcot θ
r
(1.18)
1.1.1.2 Propriétés des opérateurs
div(rotF) = 0 (1.19)
rot(gradf) = 0 (1.20)
rot(fF) = frotF +gradf∧F(1.21)
div(fF) = fdivF+gradf·F(1.22)
div(gradf) = ∆f(1.23)
rot(rotF) = grad(divf)−∆F(1.24)

1.1. GÉNÉRALITÉS 4
1.1.1.3 Théorèmes généraux
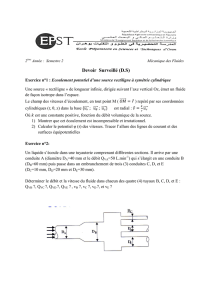
On note Dun domaine fluide de frontière ∂D. Soit dV un élément de volume entourant un point Mdu
domaine, et dA un élément de surface de ∂D entourant un point Poù la normale à la frontière est n–
voir figure ci-dessous –.
– Le théorème de la divergence et ses applications
Si Fijk(M,t)est une fonction continue sur le domaine D, alors :
ZD
Fijk ,kdV =Z∂D
FijknkdA (1.25)
•Le théorème d’Ostrogradsky :
ZD
divFdV =Z∂D
F·ndA (1.26)
•Le théorème de Green :
ZD
gradf dV =Z∂D
fndA (1.27)
•ZD
rotF dV =Z∂D
n∧FdA (1.28)
•ZD
divFdV =Z∂D
FndA (1.29)
– Le théorème de Stokes :
ZC
F(M,t)dM=ZS
rotF ·ndA (1.30)
– Le théorème de l’intégrale nulle :
Zd
f(M,t)dV = 0 ∀d⊂D⇐⇒ f(M,t) = 0 ∀M(1.31)
1.1.2 Grandeurs caractéristiques des milieux continus
Une particule matérielle d’un milieu continu est définie par :
–des variables cinématiques : les composantes (U1,U2,U3)du vecteur U,
–des variables thermodynamiques : la pression p, la température Tet la masse volumique ρ.
Le domaine Dest caractérisé par :
•sa masse m(D,t):
m(D,t) = ZD
ρ(M,t)dV (1.32)

1.1. GÉNÉRALITÉS 5
•son torseur cinétique : C(D,t):
C(D,t) = R(D,t) = RDρ(M,t)U(M,t)dV
MO(D,t) = RDρ(M,t)OM ∧U(M,t)dV (1.33)
•son énergie cinétique T(D,t):
T(D,t) = 1
2ZD
ρ(M,t)U2(M,t)dV (1.34)
•son énergie interne E(D,t):
On notera e(D,t)l’énergie interne par unité de masse :
E(D,t) = ZD
ρ(M,t)e(M,t)dV (1.35)
•son entropie S(D,t)
On notera s(D,t)l’éntropie par unité de masse :
S(D,t) = ZD
ρ(M,t)s(M,t)dV (1.36)
remarque : on peut définir l’enthalpie massique par la relation : h=e+p
ρ.
1.1.3 Actions extérieures et intérieures
1.1.3.1 Les actions extérieures
Les actions extérieures au domaine Dsont de deux types :
– à distance,
– de contact.
Elles peuvent être d’origine mécanique, thermique, électrique, chimique . . . Nous ne prendrons en compte
que les deux premières.
•Les actions mécaniques :
–actions à distance : Elles sont caractérisées par une densité massique de force f(M,t). En général, cette
densité dérive d’un potentiel et on peut écrire :
f=−grad(U(M)) (1.37)
Dans le cas des forces de pesanteur, on peut écrire :
U(M) = gh (1.38)
dans laquelle gest l’accélération de la pesanteur et hla hauteur du point Mpar rapport à une référence.
–actions de contact : Elles sont représentés par une densité surfacique d’effort T(P,t)sur la frontière ∂D
du domaine ;
–puissance mécanique des efforts extérieurs : Elle s’écrit :
Pm=ZD
ρf·UdV +Z∂D
T·UdA (1.39)
•Les actions thermiques :
–actions à distance : Le rayonnement r(M,t)– densité massique – est de ce type. Dans tous les cas
étudiés dans ce cours, il sera supposé nul.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
1
/
156
100%