ENS CACHAN LOPEZ, M. BAUCHY ENS Cachan

ENS CACHAN
61, avenue du Président Wilson
94235 CACHAN Cedex
M. BÉTHERMIN, D.
LOPEZ, M. BAUCHY
ENS Cachan
2007
RAPPORT DE PROJET EXPÉRIMENTAL
Étude et contrôle du chaos dans un système mécanique
Tuteur : Pierre Boissel
ÉCOLE NORMALE SUPÉRIEURE DE CACHAN
Phytem

Table des matières
1 Introduction 1
2 Approche théorique 2
2.1 Modélisation................................... 2
2.2 Stabilitédesmodes ............................... 3
3 Description du dispositif expérimental 5
3.1 Systèmemécanique............................... 5
3.2 Contrôleduvibreur............................... 6
3.2.1 Génération d’un signal sinusoïdal et d’un signal TTL de syn-
chronisation............................... 6
3.2.2 Amplification du signal en vue d’alimenter le vibreur . . . . . . . 7
3.3 Détectiondeschocs............................... 7
3.4 Acquisitiondesdonnées............................ 8
3.5 Visualisation des données . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6 Schéma récapitulatif du montage . . . . . . . . . . . . . . . . . . . . . . . 9
4 Observation des modes chaotiques 10
4.1 Approchenumérique.............................. 10
4.1.1 Méthode................................. 10
4.1.2 Différents modes en représentation spatio-temporelle . . . . . . . 10
4.1.3 Diagramme de bifurcation . . . . . . . . . . . . . . . . . . . . . . . 11
4.1.4 Différents modes en représentation ϕn/ϕn−1et attracteur étrange 12
4.2 Résultats expérimentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2.1 Graphe de bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2.2 Représentation τn/τn−1........................ 14
5 Contrôle du chaos 16
5.1 Introductionthéorique............................. 16
5.2 Méthodeutilisée................................. 17
5.3 Mise en place expérimentale . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.4 Résultats ..................................... 17
5.4.1 Sélectiondumode1 .......................... 17
5.4.2 Sélectiondumode2 .......................... 19
5.4.3 Basculement d’un mode à l’autre . . . . . . . . . . . . . . . . . . . 19
6 Divergence vers le chaos 20
6.1 Coefficient de Lyapounov . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.2 Étude de la divergence du mode 1 dans sa zone instable . . . . . . . . . 20
6.2.1 Miseenplace .............................. 20
M. Béthermin, D. Lopez, M. Bauchy - ENS Cachan - 18 février 2007 i


Chapitre 1
Introduction
Longtemps considérés comme une erreur de mesure ou comme la manifestation
de perturbations extérieures, les phénomènes chaotiques sont aujourd’hui de plus en
plus étudiés. Il est intéressant de constater que des manifestations chaotiques a priori
complexes peuvent être observées et étudiées sur des systèmes simples.
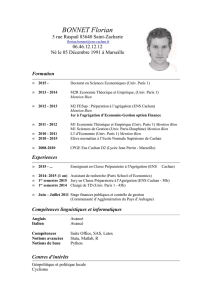
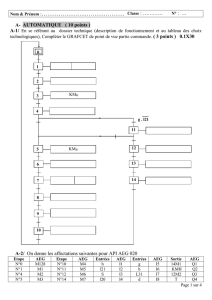
Le système que nous avons étudié peut en effet au premier abord être qualifié de
simple : on se propose d’étudier les rebondissements d’une bille sur un plateau hori-
zontal animé d’un mouvement alternatif dans la direction verticale. Bien entendu, la
réalité est souvent loin d’être simple, aussi est-il nécessaire d’utiliser quelques astuces
pour que le système étudié corresponde effectivement bien à son modèle théorique.
FIG. 1.1 – Schéma de principe
Notre premier objectif fut d’observer les modes chaotiques sur notre système. Dans
un second temps, nous avons tenté d’effectuer un contrôle du chaos permettant d’iso-
ler un des modes au sein d’une zone chaotique. Nous nous sommes enfin intéressés à
la divergence du système vers le domaine chaotique à partir d’un mode instable.
M. Béthermin, D. Lopez, M. Bauchy - ENS Cachan - 18 février 2007 1

Chapitre 2
Approche théorique
2.1 Modélisation
Le système est modélisé par une bille ponctuelle de masse m, assujettie à un mou-
vement unidimensionnel le long de l’axe vertical (noté z). Le mouvement de la bille
n’influe pas sur celui du plateau. La bille n’est soumise qu’à deux forces : son poids
et la force exercée par le vibreur lors des chocs. L’accélération de la pesanteur sera
prise égale à g= 9,81m/s. L’amplitude du vibreur est sinusoïdale de pulsation ω:
A(t) = A0cos(ωt).
On supposera que le choc est instantané sur le vibreur, c’est à dire que la bille ne
reste pas collée. Les différentes variables sont indicées par n, le numéro du choc. Au
contact du vibreur, la bille rebondit avec un coefficient de restitution noté µet tel que :
vi,n −˙
A(tn) = −µ(vf,n −˙
A(tn)) (2.1)
où ˙
Aest la dérivée temporelle de l’amplitude, soit la vitesse du vibreur. vi,n est la
vitesse après le choc et vf,n la vitesse après le choc. Le coefficient de restitution µest
compris entre 0et 1, en pratique il sera de l’ordre de 0,5.
On s’intéresse au régime périodique de fonctionnement, les conditions initiales
de la trajectoire libre de la bille sont les mêmes après chaque choc. En particulier, la
hauteur du plateau z=z(τn)étant invariante (τétant, à une constante près, la durée
entre l’instant où le vibreur est à son maximum et l’instant du choc), la vitesse finale
vf,n doit être l’opposé de la vitesse initiale :
vi,n =−vf,n =vP=gT
2(2.2)
où g est l’accélération de la pesanteur et T=2π
ωla période de la vibration, l’in-
dice Pcaractérisant les grandeurs en régime périodique. Cette équation combinée à
l’équation du choc (2.1) , donne une condition sur la vitesse du plateau à l’instant tn:
˙
A(tn) = vP
1−µ
1 + µ(2.3)
Ceci impose une relation entre A0et τP,τPétant le déphasage temporel commun
à tous les chocs :
A0ωsin(ωτP) = −vP
1−µ
1 + µ=gT
2
1−µ
1 + µ(2.4)
M. Béthermin, D. Lopez, M. Bauchy - ENS Cachan - 18 février 2007 2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
1
/
41
100%