Capteurs à effet Hall

Capteurs à effet Hall
Les capteurs à effet Hall sont des capteurs qui permettent de mesurer la présence d’un
champs magnétique. Pour cela, comme leur nom l’indique, ils utilisent l’effet Hall. Pour
expliquer grossièrement, l’effet Hall permet de générer une tension proportionnelle au
champs magnétique qui traverse le matériau.
Les capteurs à effet Hall ne doivent pas être confondus avec les capteurs Reed qui
réagissent aussi en présence d’un champs magnétique. Les capteurs à effet Hall présentent
l’avantage de pouvoir être plus fin et plus sensible tout en étant moins fragile que les
capteurs Reed. Cependant une électronique est nécessaire pour les lire ce qui n’est pas le
cas des capteurs Reed qui se comporte comme des interrupteurs.
Caractéristiques techniques principales :
- Tension d’alimentation (en V) : souvent une fourchette assez large ce qui les rend aisés à
utiliser.
- Type de sortie : linéaire ou tout ou rien.
- Sensibilité magnétique (en Gs ou T) : plage de sensibilité pour les capteurs linéaires et point de
basculement pour les capteurs tout ou rien.
- Polarité : Unipolaire ou bipolaire (sensibilité au pôle Sud, Nord ou les deux).
Ordre de grandeur du coût :
- 0,50€ et plus pour des capteurs tout ou rien.
- 2,00€ et plus pour des capteurs linéaires.
Références classiques :
- Capteur tout ou rien : US1881
- Capteur linéaire : A1321
Boitier To-92 recommandé.
« Ça ressemble à quoi un capteur à effet Hall ? »
Les capteurs les plus faciles à utiliser en tant qu’amateurs sont à mon avis ceux avec des boitiers
avec pattes traversantes comme celui ci-dessus. C’est plutôt ce type là que vous devez
rechercher. Je n’ai mis qu’un seul exemple car j’ai pu constater qu’ils se ressemblent tous avec
leurs 3 pattes et leur tête assez plate.
« C’est quoi la différence entre les types de sortie des capteurs à effet Hall ? »
Pour faire simple, les capteurs tout ou rien renvoie un signal haut (la tension à laquelle vous
l’alimentez) ou bas (0V) suivant si le champs magnétique perçu est supérieur ou non à une
valeur seuil défini par le constructeur. On parlera de sa sensibilité magnétique. Dans
les datasheet en anglais vous retrouverez les termes de release et operating point qui
correspondent aux valeurs de champ magnétique pour lesquels le signale de sortie va
transitioner d’un état à l’autre.

Attention : Suivant le modèle de capteur, l’état de la sortie n’est pas forcement
haut quand l’aimant est proche et bas lorsque l’aimant est éloigné. Cela peut aussi être l’inverse.
Comme toujours, je conseille de tester le composant à l’aide d’un multimètre avant de l’intégrer à
votre circuit pour bien comprendre son fonctionnement.
Les capteurs linéaires, quant à eux, renvoient une tension proportionnelle aux champs
magnétique dans une plage de mesure donnée (si le champ magnétique est très grand, le
capteur va saturer et renvoyer toujours la même valeur quelque soit la position de l’aimant). La
plage de la tension de sortie et ce qu’elle exprime varie d’un modèle de capteur à un autre. Si
vous ne comprenez pas très bien les explications données dans la datasheet, je vous conseille
une fois encore de prendre un multimètre pour mesurer la tension en sortie pour différentes
positions ou tailles d’aimant pour bien comprendre le fonctionnement du capteur.
« Comment savoir à quelle distance mon capteur à effet Hall va être capable de détecter
mon aimant ? »
Dans la théorie, il est possible de calculer cette distance en connaissant la sensibilité du capteur,
l’aimantation de votre aimant et quelques constantes physiques. Cependant c’est un calcul
complexe que je déconseille à quiconque qui n’a pas de solides bases mathématiques (intégrales
et compagnie) de le tenter.
Le plus simple, et le plus rapide d’ailleurs, reste encore de tester directement. Commandez par
exemple deux capteurs de sensibilité différente (ils ne sont pas très chers) et utilisez celui dont la
distance vous convient le mieux.
Si vous voulez juste être sûr que votre capteur se déclenchera bien, utilisez un petit aimant en
néodyme/fer/bore (NdFeB), ils sont très puissants et leur petite taille permet de les intégrer
facilement dans vos projets.
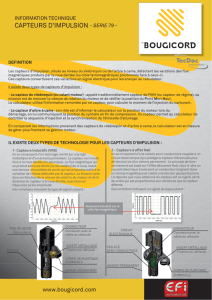
« Comment dois-je orienter mon aimant par rapport à mon capteur à effet Hall ? »
C’est un bonne question car, en effet, les capteurs a effet Hall présentés plus haut sont conçus
pour détecter les champs magnétiques dans une seule direction.
Comme le montre l’illustration ci-dessus, cette direction correspond à la direction perpendiculaire
à la surface la plus grande du capteur. Suivant s’il s’agit d’un capteur unipolaire ou bipolaire, le
pôle Nord, Sud ou un des deux doit être orienté dans cette direction pour obtenir une détection
optimale.

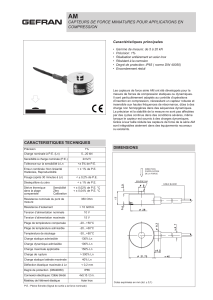
« Comment ça se branche un capteur à effet Hall ?
La majorité des capteurs à effet Hall basiques possèdent 3 pattes. Vous devez les identifier à
l’aide de la datasheet. On retrouve :
- la patte Vcc : elle doit être raccordée à votre source de tension (dans le respect dans la tension
max et min donnée par la datasheet)
- la patte GND : elle doit être raccordée à la masse de votre circuit.
- la patte Vout : elle doit être raccordée au composant qui va lire et utiliser la tension de sortie
transmise par le capteur (par exemple : une patte I/O d’un microcontrôleur.
« Quelles sont les applications concrètes de capteurs à effet Hall dans un robot ? »
Les applications de ce type de capteur dans un robot sont multiples. Cependant, ils sont surtout
employés pour vérifier la position de pièce mécanique sans qu’il y ait contact. Ainsi ils ne
demandent pas d’effort pour être activés, dans certains cas ils peuvent être plus faciles à intégrer
et ils évitent l’usure par contact s’il s’agit de pièce tournant.
Voici quelques exemples d’applications :
- Vous voulez vérifier qu’un bras de votre robot ne reste pas coincé. Vous pouvez positionner un
capteur à effet hall sur son support au niveau du pivot et un aimant sur le bras. Si le capteur ne
détecte pas d’aimant à proximité après que vous ayez activé le bras, celui-ci est sans doute
coincé.
- Vous avez fait un robot qui ramasse automatiquement vos Legos. Celui-ci ne doit pas partir
sans son conteneur dans lequel il stock les Legos. Vous pouvez mettre un capteur à effet Hall sur
votre robot et accrocher un aimant dans le fond du conteneur. Si le robot ne détecte pas la
présence du conteneur, il ne démarre pas.
- Vous avez un élément tournant sur votre robot et vous souhaitez compter le nombre de tour
effectué par cet élément tournant. Vous pouvez fixer un aimant sur l’élément en question et un
capteur à effet Hall sur la bâti de votre robot. A chaque tour, le capteur détectera le passage de
l’aimant permettant ainsi l’incrémentation de votre compteur
1
/
3
100%