B1 - L`induction électromagnétique

B1 - L’induction électromagnétique
L’induction électomagnétique est un phénomène physique qui se manifeste par la pro-
duction d’une force électromotrice, f.e.m., dans un conducteur électrique plongé dans un
champ magnétique sous certaines conditions. Lorsque le circuit électrique contenant le
conducteur est fermé, l’apparition de cette f.e.m. s’accompagne de la création d’un cou-
rant appelé « courant induit »
1 Partie th´eorique
1.1 Origine du ph´enom`ene d’induction
Ce phénomène a pour origine la force de Lorentz ~
F, appliquée aux électrons libres
contenus dans le conducteur électrique :
~
F=q~
E+q~v ∧~
B. (1.1)
Les grandeurs qet ~v sont la charge et la vitesse des particules chargées, c’est à dire les
électrons pour un métal. ~
Eet ~
Bsont les champs électrique et magnétique dans lesquels
baignent les électrons, les grandeurs vectorielles étant mesurées dans un même référentiel
Galiléen.
On peut donc faire apparaître un phénomène d’induction de deux façons :
– lorsque l’on fait varier le champ magnétique dans lequel est plongé le conducteur, on
parle de « l’induction de Neumann » : un champ électrique induit est alors créé par la
variation du champ magnétique et la f.e.m. est due au premier terme de la force de
Lorentz.
– lorsque l’on déplace ou l’on déforme le conducteur dans un champ magnétique fixe,
on parle de « l’induction de Lorentz » : la f.e.m. est alors due au second terme de la
force de Lorentz.
En fait, suivant le référentiel dans lequel on va se placer, une même expérience se présen-
tera sous l’une ou l’autre de ces deux formes qui sont donc physiquement équivalentes.
La force électromotrice induite correspond au travail par unité de charge de la force de
Lorentz pour déplacer les électrons dans le conducteur.
1

1.2 Loi de Faraday
Une autre façon de décrire le phénomène d’induction est d’utiliser la loi de Faraday qui
exprime la f.e.m. Equi apparaît dans le circuit à partir de la variation temporelle du flux
magnétique Φ:
E=−dΦ
dt =−dRRcircuit ~
B·~
dS
dt .(1.2)
La variation du flux peut être due soit à une variation du champ magnétique, soit à une
variation de la surface coupée par le champ magnétique. Dans ce dernier cas, on parle de
« flux coupé », lors du déplacement du circuit par exemple.
La force électromotrice ainsi créée, et éventuellement le courant induit, s’oppose par
ses effets aux causes qui lui ont donné naissance : on parle de la « loi de Lenz ».
Le phénomène d’induction a de nombreuses applications que vous rencontrez même
dans la vie de tous les jours. Parmi elles, on peut citer les transformateurs, comme celui qui
se trouve dans une alimentation de portable, les alternateurs de voiture ou la dynamo d’un
vélo, de nombreux moteurs électriques, les plaques à induction, le freinage par induction
utilisant les courants de Foucault...
2 Partie exp´erimentale
Vous allez utiliser dans les manipulations qui vont suivre deux bobines complémen-
taires qui peuvent s’emboîter. On les nomme « bobines de Faraday » en référence au phy-
sicien qui découvrit l’induction électromagnétique dans les années 1830.
Caract´eristiques des bobines :
Bobine b1:
Diam`etre : 47mm
Longueur enroulement : 116mm
Nombre de spires : 1200
Bobine b2:
Diam`etre : 19mm
Longueur d’enroulement : 112mm
Nombre de spires : 250
Avant de commencer les expériences, observez attentivement les deux bobines. Vous
regarderez en particulier la petite bobine pour déterminer le sens d’enroulement des fils,
en les suivant à partir des bornes rouges et noires. Le sens d’enroulement est le même pour
la grande bobine.
2

2.1 Mise en ´evidence du ph´enom`ene d’induction
Le phénomène d’induction est caractérisé par l’apparition d’une force électromotrice
dans un circuit soumis à un champ ~
B. Si le circuit est fermé, cette f.e.m. génère un courant
appelé « courant induit ». Quelques expériences vont vous permettre de faire apparaître ce
phénomène d’induction.
2.1.1 Premi`ere exp´erience
Mat´eriel : un aimant permanent, deux bobines compl´ementaires : les bobines de Faraday, un
noyau de fer doux et un oscilloscope.
Attention : l’utilisation du noyau donne un comportement amplifi´e, qualitativement
identique, mais qui n’ob´eit plus aux formules donn´ees dans ce fascicule. ´
Evitez donc
de l’employer dans les parties quantitatives.
– Branchez une des bobines de Faraday à l’oscilloscope. Déplacez l’aimant permanent
devant la bobine, en observant le signal sur l’oscilloscope. Cherchez la position et
l’orientation de l’aimant qui donnent le signal le plus marqué. Vous pouvez placer le
noyau de fer doux dans la bobine pour canaliser les lignes de champ magnétique et
amplifier ainsi le phénomène. Décrivez précisément le signal observé dans les deux
cas. Que se passe-t-il si c’est la bobine que l’on déplace devant l’aimant ?
– Observez le changement du signe de la tension suivant le déplacement, et établissez
une règle systématique.
– Faites l’expérience avec les deux bobines, qui ont un nombre de spires très différents.
Décrivez l’influence du nombre de spires sur le phénomène d’induction. Expliquez
cette influence par un raisonnement simple.
2.1.2 Deuxi`eme exp´erience
Mat´eriel : le deux bobines de Faraday, un noyau de fer doux, un g´en´erateur de tension variable
et un oscilloscope.
– Cette fois-ci, la grande bobine, b1, est reliée à un générateur de signaux à basse fré-
quence, GBF, elle est parcourue par un courant d’intensité i1variable, par exemple un
signal sinusoïdal de fréquence 1kHz. Qu’observez-vous sur l’oscilloscope, toujours
branché à la bobine b2?
– Expliquez comment le signal initial du générateur engendre le signal dans la bobine
b2. Comparez les deux signaux.
2.2 Cr´eation d’une force ´electromotrice d’induction sinuso¨ıdale
Dans cette partie du TP, vous allez utiliser un moteur à courant continu pour faire tour-
ner un aimant permanent. Si vous placez une bobine devant cet aimant, la variation du
flux magnétique reçu par la bobine va créer en son sein une f.e.m. d’induction.
3

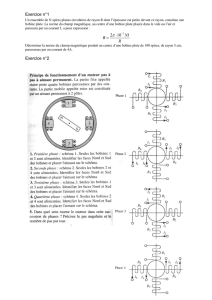
Principe du moteur `a courant continu, vu aussi en cours :
Lorsque l’on place une spire parcourue par un courant dans un champ magn´etique ext´erieur, il
apparaˆıt un couple de forces de Laplace. Ce couple de forces fait tourner la spire jusqu’`a aligner
le vecteur ~
S, perpendiculaire `a sa surface, avec le champ magn´etique. Si le sens du courant
reste inchang´e au cours de ce d´eplacement, le couple de rotation diminue constamment jusqu’`a
s’annuler dans cette derni`ere position o`u la spire est perpendiculaire au champ magn´etique.
Le moteur continu utilise ce principe : un stator cr´ee un champ magn´etique ; ce stator peut ˆetre
constitu´e d’aimants permanents ou d’´electro-aimants. Un rotor porte des spires conductrices
parcourues par un courant continu, fourni par l’alimentation du moteur ; ces spires, soumises
alors `a des forces de Laplace, entraˆınent la rotation du rotor. Afin d’avoir un couple qui ne varie
pas avec l’angle de rotation, comme c’est le cas pour la spire, il y a plusieurs enroulements
r´epartis de fa¸con r´eguli`ere sur le pourtour du rotor. D`es qu’une de ces spires passe dans sa
zone neutre, le courant qui la traverse est invers´e grˆace `a un dispositif de contacts tournants :
le collecteur .
U
Ri
E
alimentation
collecteur
Im
m
Nord
Sud
stator
stator
rotor
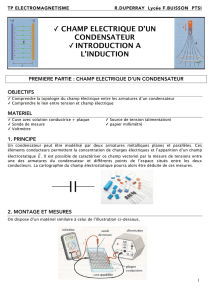
Figure 1 –
Le sch´ema ´electrique du rotor est id´ealis´e par la figure 1. Umd´esigne la tension d’alimentation
du moteur, Imle courant qui traverse les spires du rotor, et une force ´electromotrice Eest
induite par la variation de flux magn´etique `a travers chaque spire lors de la rotation (voir
exp´erience 1de ce TP). La valeur moyenne Ede cette f.e.m. est proportionnelle `a la vitesse
angulaire de rotation ωdu rotor et au flux maximal Φdu champ magn´etique `a travers une spire
du rotor. La constante de proportionnalit´e Kd´epend des caract´eristiques du moteur, comme le
nombre de spires, la surface de chaque spire. . . On a
E=KΦω(2.1)
4

En appliquant la loi des mailles dans le circuit alimentation +moteur, cette f.e.m. s’exprime
aussi en fonction de la tension Uid´elivr´ee par le g´en´erateur et de la r´esistance interne Rides
spires :
E=Um−RiIm(2.2)
Lorsque le moteur n’est pas frein´e, il n’a pas besoin de fournir de couple (ou puissance) et le
courant Imabsorb´e est pratiquement nul. On peut alors ´ecrire
Um=KΦω. (2.3)
2.2.1 Cr´eation d’une tension alternative par rotation d’une bobine devant un
aimant permanent
Mat´eriel : un ensemble rotor-collecteur-balais entraˆın´e par une manivelle, un aimant en U,
un oscilloscope.
– Branchez l’oscilloscope au niveau des balais puis tournez la manivelle. Représentez
et interprétez le signal observé en essayant les deux sens de rotation.
2.2.2 Cr´eation d’une tension alternative par rotation d’un aimant devant une
bobine, et mesure de la vitesse du moteur
Mat´eriel : une alimentation 0−30V utilis´ee entre 0et 10V, un ensemble rotor-collecteur-balais
qui entraˆıne un aimant tournant, un aimant en U, une des deux bobines de Faraday, un
oscilloscope.
Attention : Le moteur ne supporte qu’une tension inf´erieure `a 12V.
– Observez et comprenez comment les différents éléments du moteur permettent son
fonctionnement, en vous aidant éventuellement du descriptif théorique précédent.
– Alimentez le moteur avec une tension inférieure à 10V, par exemple 7V. Le moteur
entraîne l’aimant permanent mobile par l’intermédiaire de la courroie. Placez la bo-
bine devant cet aimant tournant et visualisez le signal ainsi généré sur l’oscilloscope.
Dessinez la forme de ce signal, en vous aidant éventuellement de la fonction « ar-
rêt sur image » de l’oscilloscope. Interprétez les différentes parties du signal en les
reliant aux différentes étapes du mouvement de l’aimant sur un dessin. Expliquez
cette correspondance d’abord avec la loi de Faraday, puis avec la loi de Lenz.
– À partir du signal de l’oscilloscope, évaluez la vitesse de rotation de l’aimant. Puis, en
utilisant les diamètres intérieurs des deux poulies, trouvez la vitesse du moteur.
– Observez à l’aide de l’oscilloscope la tension d’alimentation du moteur. Elle devrait
être continue et ne l’est pas tout à fait. En interprétant précisément l’origine de cette
fluctuation, trouvez une autre façon d’évaluer la vitesse du moteur.
– Comparez les deux méthodes pour quelques valeurs de la vitesse.
5
 6
7
8
6
7
8
1
/
8
100%