Systèmes d`exploitation des ordinateurs - UVT e-doc

Systèmes d'exploitation des ordinateurs
Mme Mona LAROUSSI & Mme Leila BACCOUCHE
Université Virtuelle de Tunis
2007


1. Rappels sur le matériel
1.1. Architecture simplifiée d'un ordinateur
1.2. la carte mère
1.3. L'unité centrale
1.1 Architecture simplifiée d'un ordinateur
Commençons par préciser ce que nous entendons par le terme "ordinateur", car les ordinateurs
ne sont pas tous pareils. Un ordinateur dans le jargon des utilisateurs est associé au PC
(personnel Computer) qui désigne l’ordinateur personnel. Toutefois, un ordinateur peut être
une machine beaucoup plus puissante qu’un simple PC. De nos jours un ordinateur est
constitué d’une partie matérielle et d’une partie logicielle. Même s'ils n'ont pas tous le même
aspect, tous les ordinateurs comportent les mêmes éléments de base à savoir :
● Une unité pour effectuer les traitements, également appelée unité centrale ou
processeur,
● Une unité pour contenir les programmes à exécuter qui est le lieu de travail dans
un ordinateur communément appelée mémoire centrale,
● Des périphériques de stockage permanent pour y enregistrer les travaux effectués
en mémoire centrale tel que le disque dur,
● Des dispositifs pour entrer et récupérer des données appelés périphériques d'entrée-
sortie : un écran, une souris, un clavier, un lecteur de disquettes et un lecteur de CD-
ROM ou DVD-ROM.
On trouve également une horloge et plusieurs bus afin de permettre à ces unités de
communiquer. Le processeur est un composant qui a besoin d'une horloge pour contrôler la
cadence des opérations qu'il exécute.
L'unité centrale et la mémoire centrale sont internes à l'ordinateur et sont disposées sur une
carte appelée carte mère qui est en fait un circuit imprimé à base de silicium. Les autres

section1
composants sont externes, quoique le disque dur soit généralement placé à l'intérieur mais il
peut également fonctionner en étant externe.
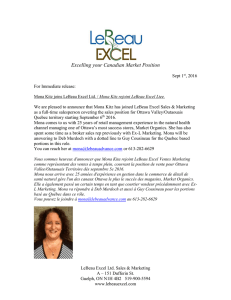
La figure suivante explicite la structure d'un ordinateur d'un point de vue système :
Fig. 1. Structure simplifiée d'un ordinateur
1.2 La carte mère
Du point de vue physique, la carte mère est une plaque de résine contenant à l'intérieur et sur
les deux faces une fine couche de cuivre sur laquelle est imprimé le circuit imprimé. La couche
de cuivre contient les fils électriques qui relient les composants. La carte mère supporte les
principaux éléments d'un PC, sans elle un ordinateur ne peut pas fonctionner. On y trouve les
éléments suivants :
● Le microprocesseur
● La mémoire vive RAM (Random Access Memory). Elle représente le lieu de travail
dans un ordinateur à savoir qu’un programme stocké sur le disque dur est chargé en
mémoire centrale où ses instructions seront accédées une à une pour être exécutées par
le processeur. La RAM est une mémoire volatile c'est-à-dire que son contenu serait
perdu en cas de coupure d’électricité. Elle est constituée d’un ensemble de puces
(circuits intégrés) assemblées en barrettes de 32, 64 ou 128 MO dites barrettes SIMM
ou DIMM.
● La mémoire morte ROM (Read Only memory). Elle contient les programmes du
BIOS qui gèrent le chargement du système et les entrées-sorties. On distingue plusieurs

section1
puces ROM tel que la PROM (Programmable ROM) et EPROM (Erasable
Programmable ROM)
---> La hierarchie des mémoires.
● L'horloge qui permet de cadencer le fonctionnement du processeur, du bus. Sa
fréquence caractérise la carte mère. Elle est généralement très inférieure à celle du
processeur (de l'ordre de quelques centaines de MHz).
● Un ensemble de bus : un bus est un ensemble de fils de cuivre incrustés dans la carte
mère qui permettent de véhiculer l'information. Le bus se caractérise par le nombre de
fils qui le composent. Si le nombre de fils est de 64, on parle alors de bus 64 bits. Il est
également caractérisé par sa fréquence de fonctionnement.
● Le "chipset" ou "jeu de composants" soudé sur la carte mère. Le chipset régit tous
les échanges au sein du PC en aiguillant les données sur les différents bus de la carte
mère.
Les périphériques sont des dispositifs qui sont assez lents par rapport à l'unité centrale, cette
dernière ne peut donc pas rester à l'écoute pour savoir si le périphérique est prêt à lui envoyer
une donnée ou à la recevoir. Un composant appelé contrôleur est associé à chaque
périphérique et gère le dialogue avec l'unité centrale. La mémoire centrale également a une
fréquence faible par rapport à l'unité centrale, on lui associe donc un contrôleur. On distingue
les contrôleurs suivants présents sur la carte mère :
● Les différents contrôleurs d’entrée/sortie (disque, mémoire, clavier, moniteur)
● Des slots : emplacements pour connecter des cartes d'extension. On peut ainsi connecter
une carte réseau avec ou sans fil, une carte modem, une carte son, carte TV, une carte
graphique.
● des connecteurs d'alimentation, USB, de clavier, de disque etc.
Exemple de connecteur : connecteurs d'extension .
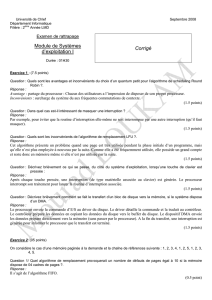
La figure n° 2 qui suit présente une unité centrale de PC découverte. On peut voir au fond la
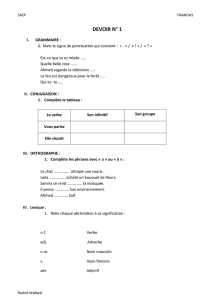
carte mère et les cartes d'extension. La figure n° 3 présente la carte mère d'un ordinateur de
type PC.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
1
/
230
100%