Machines asynchrones

Machines asynchrones : éléments de correction (2)
VI. Démarrage et variation de vitesse
1. Introduction
➢Au démarrage, g = 1, le courant statorique sous tension nominale est important (voir le diagramme du
cercle) et le couple de démarrage peu élevé (voir l’évolution du couple électromagnétique en fonction du
glissement ou de la vitesse).
➢Le couple électromagnétique en fonction du glissement est donné par la relation ci-contre :
Pour faire varier la vitesse (donc le glissement), il est possible d’agir sur :
•la résistance rotorique ramenée au stator : R
•la pulsation ou la fréquence des courants statoriques : w ou f
•la valeur efficace des tensions statoriques : Vs
•le nombre de paires de pôles : p
Cem=3pV s
2
2f
R
g
R
g
2
L2
2. Action sur la valeur efficace des tensions statoriques
➢Le stator de la machine est alimenté par des tensions statoriques de valeur efficace variable et de
fréquence fixe.
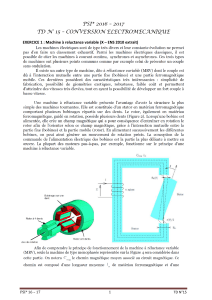
➢Les graphes ci-contre représentent l’évolution du
couple et de l’intensité pour deux valeurs efficaces
différentes des tensions statoriques. On note V1 et
V2 ces deux valeurs, elles sont liées
respectivement à Cem1, I1 et Cem2, I2. Laquelle des
tensions est la plus élevée ?
V1
est plus élevée que
V2
car le couple est
plus important pour une valeur de glissement
donnée.
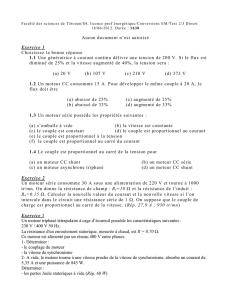
•Repérer sur les courbes l’intensité efficace des
courants statoriques au démarrage. Quelle est la
valeur de
I2D
I1D
?
Ces courants sont lus pour
n=0
Lorsque la valeur efficace des tensions statoriques
est divisée par deux alors l'intensité efficace des
courants statoriques est aussi divisée par deux :
I2D
I1D
=0,5
•Repérer sur les courbes les couples de démarrage
et maximaux. Calculer
Cem2D
Cem1D
et
Cem2max
Cem1max
.
Ce type de démarrage est-il bien adapté si la
charge mécanique oppose un couple résistant
constant ?
Lorsque la valeur efficace des tensions statoriques
est divisée par deux alors les couples de démarrage
et maximaux sont divisés par quatre :
Courbes Cem = f(n) pour deux valeurs efficaces de la
tension statorique
Courbes I = f(n) pour deux valeurs efficaces de la
tension statorique
Cem2D
Cem1D
=0,25
et
Cem2max
Cem1max
=0,25
Si le couple résistant opposé par la charge est constant, le couple électromagnétique peut être trop faible pour
un démarrage dans de bonnes conditions.
P1
P2

•Placer sur le graphe Cem = f(n) le couple résistant de la charge mécanique si il est égal à 75% du couple de
démarrage le plus faible.
Voir le trait horizontal en vert sur la caractéristique de couple.
Faire apparaître les points de fonctionnement pour chacune des valeurs efficaces des tensions statoriques.
Les points de fonctionnement sont aux intersections des caractéristiques de couple avec la courbe associée au
couple résistant (ils sont notés P1 et P2).
➢Avantages : l’intensité de démarrage est plus faible, elle est divisée par deux si la valeur efficace des tensions
statoriques est divisée par deux.
➢Inconvénients :
•Le couple de démarrage est plus faible, il est divisé par quatre si la valeur efficace des tensions statoriques est
divisée par deux.
•La variation de vitesse dépend de la valeur efficace des tensions statoriques mais aussi de la charge.
➢Réalisation : auto transformateur au stator, alimentation par gradateur, démarrage étoile triangle.
3. Action sur la résistance rotorique
➢On fait varier la résistance des enroulements rotoriques.
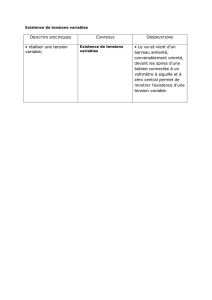
➢Les graphes ci-dessous représentent l’évolution du couple et de l’intensité pour deux valeurs de la résistance du
rotor. On note Rh1 et Rh2 ces deux valeurs, elles sont liées respectivement à Cem1, I1 et Cem2, I2. Laquelle des
résistances est la plus élevée ?
La résistance Rh2 est plus grande que Rh1.
Courbes Cem = f(n) pour deux valeurs de la résistance
rotorique.
Courbes I = f(n) pour deux valeurs de la résistance
rotorique.
•Repérer sur les courbes les couples de démarrage et maximaux. D’après les résultats du paragraphe IV.2,
indiquer la courbe correspondant à la résistance rotorique la plus élevée.
Les couples de démarrage sont lus pour une vitesse nulle. Le couple de démarrage augmente avec la résistance
rotorique, on retrouve que la résistance Rh2 est la plus grande.
•Repérer sur les courbes l’intensité efficace des courants statoriques au démarrage. Comment évolue-t-elle si la
résistance rotorique augmente ?
Les intensités efficaces de démarrage sont lues pour une vitesse nulle. Si la résistance rotorique augmente alors
l'intensité efficace diminue.
•Placer sur le graphe Cem = f(n) le couple résistant de la charge mécanique si il est égal à 75% du couple de
démarrage le plus faible. Faire apparaître les points de fonctionnement pour chacune des valeurs de résistances
rotoriques.
Voir le trait horizontal en vert sur la caractéristique de couple.
➢Avantages : Comme prévu au paragraphe IV.2 la valeur maximale du couple ne dépend pas de la valeur de la
résistance.
Machines asynchrones Page 2 TS2 ET 2014-2015

➢Inconvénients :
•Les résistances génèrent des pertes par effet Joule ce qui pénalise le rendement.
•La variation de vitesse, comme pour la variation de la valeur efficace des tensions statoriques, dépend de la
charge. À noter qu’elle n’est pas possible avec les rotors à cage.
➢Réalisation :
•Pour un rotor bobiné, des résistances sont connectées à ses bornes.
•Pour les rotors à cage, il est possible d’obtenir une variation de la résistance rotorique en utilisant des doubles
cages (l’une interne, l’autre externe) ou des cages à encoches profondes.
Lors du démarrage, la fréquence des courants rotoriques
est élevée. À cause de l’effet pelliculaire (ou effet de
peau), ils circulent en périphérie de la cage : celle-ci
présente donc une résistance réelle élevée. Au fur et à
mesure de l’accélération, la fréquence des courants
rotoriques diminue et ils pénètrent plus profondément :
la résistance réelle de la cage diminue.
Effet pelliculaire : la densité d’un courant alternatif circulant dans un conducteur est plus importante à sa
périphérie qu’en son centre (la transition n’est pas brutale). L’épaisseur dans laquelle circule le courant diminue
lorsque la fréquence augmente. Pour le cuivre à 50 Hz, la zone utile a une épaisseur de 9 mm.
➢Amélioration : l’énergie perdue au rotor par effet Joule peut être récupérée et réinjectée sur le réseau en utilisant
une cascade hyposynchrone. Cette technique n'est plus utilisée pour les fonctionnements en moteur mais revient
dans les génératrices hypersynchrones utilisées pour les éoliennes (machines à double alimentation).
4. Fonctionnement à V/f constante
➢Le stator de la machine est alimenté par des tensions statoriques de valeur efficace V et de fréquence f variables :
le rapport V/f est maintenu constant.
➢Si les impédances statoriques sont négligées, la relation de Boucherot permet d’écrire
Vs=2,22 Nsfm
soit
m=Vs
2,22 Nsf
. Si le rapport
Vs
f
est maintenu constant que peut-on dire du flux maximal ?
➢Le graphe ci-contre représente l’évolution du couple
électromagnétique en fonction de la vitesse pour deux
valeurs de la fréquence des tensions statoriques. Le
graphe de la page suivante représente l'évolution du
courant en fonction de la vitesse pour ces deux
mêmes valeurs. On note V1, f1 et V2, f2 ces valeurs,
elles sont liées respectivement à Cem1, I1 et Cem2, I2.
•Laquelle des tensions est la plus élevée ?
C'est V1 car elle correspond à une vitesse de
synchronisme, donc une fréquence, plus élevée.
•Repérer les couples et les intensités statoriques au
démarrage. Leurs évolutions respectives sont elles
intéressantes ?
Les couples et intensités efficaces de démarrage sont lus
pour une vitesse nulle. Le couple augmente lorsque
l'intensité efficace de démarrage diminue ce qui est
favorable.
Courbes Cem = f(n) pour deux valeurs efficaces des
tensions statoriques.
•Placer sur le graphe le couple résistant de la charge mécanique s’il est égal à 75% du couple de démarrage le
plus faible. Faire apparaître les points de fonctionnement. La vitesse dépend-elle de la charge mécanique ?
Voir le trait horizontal en vert sur la caractéristique de couple. La vitesse dépend faiblement de la charge
Machines asynchrones Page 3 TS2 ET 2014-2015

mécanique (beaucoup moins qu'avec les méthodes précédentes)
➢Mise en équation pour les faibles glissements. Le
couple électromagnétique peut s’écrire :
Cem=3Vs
2
s
g
r
•Rappeler l’expression de g en fonction de W et Ws.
Par définition
g=Ωs−Ω
Ωs
•Montrer que l’expression du couple
électromagnétique peut s’écrire
Cem=Ks−
en précisant la valeur littérale de K.
En remplaçant g par son expression dans la relation
Cem=3Vs
2
Ωs
g
r
, on obtient
Cem=3Vs
2
Ωs
1
r
Ωs−Ω
Ωs
Courbes I = f(n) pour deux valeurs efficaces des
tensions statoriques.
La vitesse de synchronisme est reliée à la fréquence par
Ωs=2πf
p
, l'expression précédente devient
Cem=3p2Vs
2
(2πf)2
1
r(Ωs−Ω)= 3p2
(2π)2r(Vs
f)
2
(Ωs−Ω)
. On obtient la relation proposée dans l'énoncé en posant
K=3p2
(2π)2r(Vs
f)
2
➢Avantages : l’intensité du courant de démarrage est limitée. Dans la zone de fonctionnement utile, les courbes
Cem = f(n) sont proches de la verticale, la vitesse de rotation est quasiment indépendante de la charge.
➢Inconvénients et améliorations :
•L’onduleur est « relativement » complexe.
•Pour les faibles valeurs de fréquence (donc de
tension), les impédances statoriques ne sont plus
négligeables et les courbes Cem = f(n) se déforment.
Sur le graphe ci-contre, la chute de tension aux
bornes de la résistance statorique n’est pas
négligeable, les courbes de couple pour les faibles
fréquences (donc les faibles vitesses) sont différentes
de celles pour les fréquences élevées.
•Il n’y a pas de couple de maintien lorsque la machine
est à l’arrêt.
•Pour améliorer le fonctionnement, on utilise le « Boost » pour les faibles fréquences, la compensation de
glissement et les commandes vectorielles.
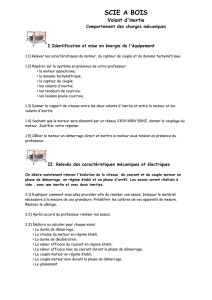
5. Variation du nombre de pôles
En modifiant les connexions entre les bobines statoriques, il est possible de modifier le nombre de pôles de la
machine et donc sa vitesse de synchronisme pour une fréquence d’alimentation donnée.
Exemple :
En modifiant les connexions entre
deux bobines constitutives d’une
phase de la machine, il est possible
de passer de quatre pôles à deux
pôles
Machines asynchrones Page 4 TS2 ET 2014-2015

6. Changement du sens de rotation
Pour inverser le sens de rotation d’un moteur asynchrone, il suffit d’inverser l’ordre des phases du système triphasé
de tension qui l’alimente. S’il est connecté sur un réseau, le changement de sens est obtenu en inversant deux
phases au stator (cette inversion peut être câblée définitivement ou commandée par des contacteurs). S’il est relié à
un variateur de vitesse, c’est la séquence de commande des interrupteurs de l’onduleur de sortie qui doit être
modifiée.
Exercice 11
On réalise les essais suivants pour un moteur asynchrone dont la plaque signalétique indique 230 V/ 400 V.
Essai à vide : valeur efficace d’une tension simple 230 V, intensité efficace en ligne 1,6 A ; puissance absorbée 240 W.
Essai en court-circuit : valeur efficace d’une tension simple 48 V, intensité efficace en ligne 3,2 A ; puissance
absorbée 156 W.
1. Déterminer les éléments du schéma équivalent d’une phase du moteur (prendre les notations du cours).
Le schéma utilisé est celui du paragraphe II.4 (page 3).
•On utilise l'essai à vide pour
Rf
et
Lm
:
Puissance active
Ps0=3Vs
2
Rf
soit
Rf=3Vs
2
Ps0
=32302
240 =661Ω
Puissance réactive :
Qs0=3Vs
2
Lmω
soit
Lm=3Vs
2
Qs0 ω
Comme
Qs0=
√
Ss0
2−Ps0
2
et
Ss0=3VsIs0=3×230×1,6=1104 VA
alors
Qs0=
√
11042−2402=1077 var
Finalement
Lm=3Vs
2
Qs0 ω=32302
1077×2π×50 =156 mH
•On utilise l'essai en court-circuit (et rotor bloqué) pour
R
et
L
La puissance active est consommée par
Rf
et
R
et la puissance réactive est consommée par
Lm
et
L
.
Pour déterminer ce que consomme
R
, il faut calculer ce que consomme
Rf
soit
Pfcc=3Vscc
2
Rf
=3482
661 =10 W
. Finalement
PR=Pscc – Pfcc=156 –10=146 W
Pour déterminer ce que consomme
L
, il faut calculer ce que consomme
Lm
soit
Qmcc=3Vs
2
Lmω=3482
0,156×2π×50 =141 var
. La puissance réactive au stator pour cet essai est donnée par
Qscc=
√
(3Vscc Iscc)2−Pscc
2=
√
(3×48×3,2)2−1562=434 var
Finalement
QL=Qscc – Qmcc =434 –141=293 var
La puissance apparente pour le « rotor ramené au stator » est
Stcc=
√
PR
2+QL
2=
√
1462+2932=327 VA
. Elle
peut aussi s'écrire
Stcc=3Vscc Istcc
ce qui donne
Istcc=Stcc
3Vscc
=327
3×48 =2,27 A
(on peut aussi utiliser un
diagramme vectoriel ou les nombres coplexes pour déterminer cette intensité efficace).
Puisque
PR=3R Istcc
2
alors
R=PR
3Istcc
2=146
3×2,272≈9,4 Ω
Puisque
QL=3LωIstcc
2
alors
L=QL
3ωIstcc
2=293
3×2π×50×2,272=60,3 mH
On souhaite démarrer ce moteur entraînant un ventilateur à l’aide d’un démarrage étoile triangle.
Machines asynchrones Page 5 TS2 ET 2014-2015
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%