division

TD/TP circuits et architectures logiques
2014
1
1A Circuits logiques
DIVISION
Objectifs :
Concevoir, simuler et synthétiser un circuit logique pour la division de deux nombres de 4 bits.
1. Présentation du sujet
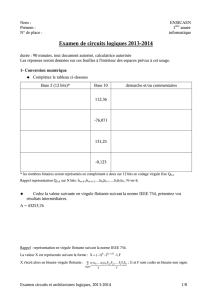
1.1 Rappel opération de division
opérateur arithmétique structuré cascadable ou
complexe reposant sur les autres opérateurs.
Toutefois, comme pour les autres opérateurs, le
la division
ière de diviser 2 nombres à la
main. Un exemple est illustré en Figure 1. En
base 10, le diviseur multiplié par des puissances de 10 est soustrait au dividende autant de fois que
possible.
En base 2, les multiplications sont avantageusement remplacées par des décalages à gauche.
implémentation de la division reprend cette démarche. Elle peut être réalisée de façon logicielle
(soft) sur une UAL donnée ou matérielle (hard). Une réalisation hard
optimisée et donc plus rapide. Ce TD/TP a pour objectif ce type de réalisation hard de diviseur.
1.2 Algorithme de division
Non Restoring Division Algorithm).
Les étapes de cet algorithme sont décrites ci-dessous et un exemple suit dans le tableau 1.
Algorithme de division sans restauration :
Décalage des registres P et A de 1 bit vers la gauche.
Si le contenu du registre P est négatif :
on additionne le contenu du registre B à P
Si le contenu du registre P est positif :
on soustrait le contenu du registre B à P
Si le résultat chargé dans P est négatif on met le bit de poids faible de A (A0) à « 0 » sinon à « 1 ».
Ces étapes sont répétées N fois, N étant le format des données, ici N=4.
Figure 1 : exemple de division en base 10.
156=12*10+3*12.

TD/TP circuits et architectures logiques
2014
2
Opération élémentaire
P
P4P3P3P1P0
A
A3A2A1A0
Commentaires
Chargement des
registres
00000
0111
Initialisation des registres. Chargement du
dividende (A) et du diviseur (B)
décalage
00000
111-
décalage P,A de 1 bit à gauche
-B
11110
111-
-B)).
A0<=0
11110
111
0
résultat <0, A0 mis à « 0 ».
décalage
11101
110-
décalage P,A de 1 bit à gauche
+B
00010
110-
P<0, on additionne le diviseur B (P+B).
A0<=0
11111
1100
résultat <0, A0 mis à « 0 ».
décalage
11111
100-
décalage P,A de 1 bit à gauche
+B
00010
100-
P<0, on additionne le diviseur B (P+B).
A0<=1
00001
1001
résultat >0, A0 mis à « 1 ».
décalage
00011
001-
décalage P,A de 1 bit à gauche
-B
11110
001-
-B)).
A0<=1
00001
0011
résultat >0, A0 mis à « 1 ».
quotient
Tableau 1: Algorithme de division sans restauration. Exemple de la division de 7 (0111) dans le registre A par 2 (0010)
dans le registre B. Remarque -2 (11110). Le
quotient obtenu 0011 (3) corresponde au résultat de la division de 7 par 2.
2. Implémentation matérielle
2.1 Présentation de la structure générale de l’implémentation matérielle
matérielle ogique avec une unité
de traitement (UT) dédiée aux opérations élémentaires et une unité de contrôle (UC) chargée de la
piloter. Une structure de ce type, celle utilisée dans ce TD/TP, est illustrée en Figure 2. La demande de
division, DIVstart, provient d
locale de la division hardware
CPU qui vient chercher les résultats de la division quand le signal DIVend est actif.
Figure 2: Schéma bloc de l’implémentation matérielle de la division.

TD/TP circuits et architectures logiques
2014
3
nt choisie est décrite dans la Figure 3. Elle comprend 3 registres de données et un
additionneur/soustracteur. Les registres possèdent tous une commande de chargement (LOADA,
LOADB, LOADP). Le registre A de 4 bits utilisé pour charger initialement le dividende possède
également une commande de décalage (SHIFTA) et une commande pour le chargement du bit de poids
faible A0 (LOADA0). Le registre P de 5 bits, pour le stockage des résultats intermédiaires, possède
aussi une commande de décalage (SHIFTP). Par ailleurs, une commande RESETP permet
lialisation à « 00000 » de ce registre.
Figure 3: Architecture de l'unité de traitement implémentant l'algorithme de division A/B pour la division du contenu du
registre A (dividende) par le contenu du registre B (diviseur). Le résultat de la division (quotient) se trouve dans le registre A
à la fin de l’opération. P est un registre de travail initialisé à zéro et stockant les résultats intermédiaires d’addition de
soustraction et de décalage.
2.2 L’unité de contrôle
2.2.1 Questions préalables
Les commandes
̅
̅
̅
̅
̅
̅
̅
et la valeur du bit A0 sont déterminées par les signes du contenu du
-soustracteur. Les sorties signe sont à « 1 » pour un nombre
négatif et à « 0 » pour un nombre positif ou nul (représentation en complément à deux).
Q.1 Exprimez
̅
̅
̅
̅
̅
̅
̅
et la valeur de A0 à charger en fonction des bits de signe de P et du
résultat
Q.2 Comment sont obtenues les sorties signe de P et ?

TD/TP circuits et architectures logiques
2014
4
2.2.2 Conception de l’unité de contrôle
Concevez la machine La conception devra
appuyer sur le tableau t
Le signal DI valeur du quotient à la fin de
Une sortie DIVend indique quand le résultat est disponible.
Les commandes LOAD effectuent le chargement des valeurs présentes en entrée des registres (B, P, A
et A0
commande RESETP met à 00000 le contenu du registre P.
La période de cadencement, clk, de la machine supérieure au temps de
Figure 4: Schéma bloc de la machine à états finis contrôlant l'algorithme de division
description
état/cycle
LOADB
RESETP
SHIFTP
LOADP
SHIFTA
LOADA
LOADA0
DIVend
division terminée, attente DIVstart
0
0
0
0
0
0
0
0
1
début division, chargement registres
1
1
1
0
0
0
1
0
0
Après analyse, des simplifications sont possibles et finalement, seuls 4 signaux de sortie pour lunité
de contrôle sont nécessaires (voir la figure 5) pour piloter lunité de traitement dont le schéma est
présenté en figure 5.
Exprimez LOADcalc, LOADinit et SHIFTAP en fonction de LOADB, RESETP, SHIFTP, LOADP, SHIFTA,
LOADA, LOADA0.

TD/TP circuits et architectures logiques
2014
5
Figure 5: Schéma bloc de la machine à états finis simplifiée contrôlant l'algorithme de division
Figure 6: Schéma de l’unité de traitement fournie.
2.2.3 Synthèse de l’unité de contrôle
Synthétisez
1
/
5
100%