TP7 :VARIATION DE VITESSE D`UN MOTEUR A COURANT

1
α
ie
DC
DC VS
Ve
Sourc Moteur à Courant
Continu
IS
Convertisseur
TP7 :VARIATION DE VITESSE D'UN MOTEUR A COURANT
CONTINU AU MOYEN D'UN HACHEUR SERIE
INTRODUCTION
Initialement, les machines électriques ont été d'abord conçues pour travailler en un
point de fonctionnement (le point nominal) pour lequel leur puissance massique et/ou leur
rendement étaient optimisés. Cependant, pour les applications de traction ou encore dans
les automatismes (robots industriels ou ménagers) de plus en plus nombreux, leur vitesse
et leur couple varient constamment. La conception des machines a dû alors être peu à peu
repensée : Il a fallu revoir fondamentalement leur construction, tant du point de vue des
matériaux que des structures mécaniques. Désormais, on ne conçoit plus la machine pour
elle-même, mais en tant que composant d’un ensemble alimentation – actionneur.
La machine à courant continu a été historiquement la première utilisée pour cela, car
la plus simple à mettre en œuvre pour réaliser des variateurs de vitesse. Bien qu'étant peu
à peu supplantée par les moteurs à courant alternatifs (synchrone ou asynchrone, plus
robustes et souvent moins coûteux), cette machine continue à être pédagogiquement
intéressante car elle permet d'illustrer simplement les principes de base mis en œuvre
dans les associations modernes convertisseur-machine.
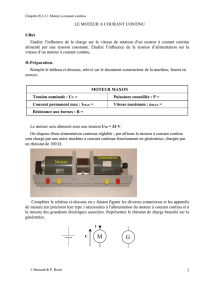
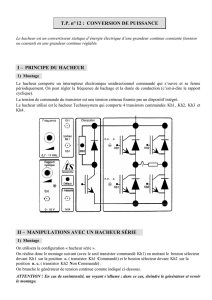
OBJECTIFS DE LA MANIPULATION
Le but principal de cette manipulation est l'étude de la variation de vitesse d'un
moteur à courant continu à aimants permanents au moyen d'un hacheur série (schéma ci
dessous). C'est un ensemble utilisé par exemple pour la propulsion de véhicules
électriques, (métro, voiture, TGV …) ou encore les appareils ménagers (les perceuses
sans fil, robots de cuisine …). A partir d'une source de tension fixe, on peut ainsi ajuster
le point de fonctionnement de la machine. Le hacheur série, commandé par modulation
de largeur d'impulsion (M.L.I.), constitue une "source de tension moyenne" réglable et à
haut rendement, compact et très souple d'utilisation.

2
A l'issue de la manipulation, (et après consultation du cours !), l'étudiant doit savoir
aborder ou traiter les points suivants :
- Variation de vitesse d'un moteur à courant continu :
- Fonctionnement qualitatif, réglage de la vitesse par le rapport cyclique ;
- Schéma équivalent de la machine à courant continue ;
- Identification des paramètres de la machine par des mesures ;
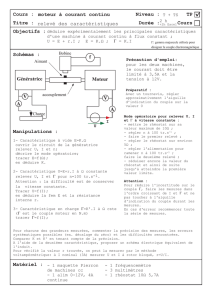
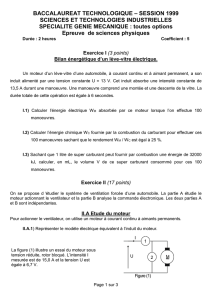
MATERIELS MIS À DISPOSITION
- une alimentation continue réglable 0-60V/20A,
- une platine de commande de hacheur (fig. 1),
- un hacheur 80V/10A (fig. 2).
- un rhéostat (33 Ω, 6 A) ,
- une boîte de selfs,
- un banc de machines à courant continu et à aimants permanents (300W, 60V),
- une sonde de courant instantané (20A,),
- un oscilloscope numérique.
Figure 1
Figure 2
PRECAUTIONS ET RECOMMANDATIONS
Il est impératif de faire vérifier tous les montages à chaque modification. Ne pas dépasser
5 A de courant de charge moyen !
Lorsqu'un nouveau montage est demandé, ne pas décâbler systématiquement le
précédent avant d'avoir vérifié si une partie ne peut pas être conservée !

3
MANIPULATION
1 - MESURES PRELIMINAIRES SUR LA MACHINE A COURANT CONTINU A
AIMANTS PERMANENTS.
Un moteur à courant continu et à aimants permanents, fonctionnant à vitesse constante et
traversé par un courant continu I possède comme modèle simplifié celui de la Figure 3.
V
I
r
Em
+
Figure 3
r : résistance de l'induit (faible)
Em=k.Ω (avec Ω en rad.s-1) : force contre-électromotrice
Cm=k.I : couple électromoteur (ou couple moteur)
k est la constante de couple ou de force électromotrice,
caractéristique de la machine. La réaction magnétique d'induit
(champ créé par l’induit perturbant le champ inducteur) est
négligeable, à cause de l’utilisation d’aimants à l’inducteur.
•
Résistance r de l'induit :
- Par une méthode volt-ampèremétrique, évaluer la résistance totale r de l'induit de la
machine. Employer pour cela la source de tension continue réglable (0-60V/20A) et justifier
l'utilisation ce cette méthode (courte ou longue dérivation) par rapport à l’utilisation d’un
simple ohmmètre. Mesurer cette résistance pour 1 et 5 A.
- Pourquoi doit-on bloquer le rotor de la machine?
•
Constante de couple (ou de fem):
- Toujours au moyen de la source de tension réglable (0-60V/20A) et en fonctionnement de la
machine à vide, relever la vitesse de rotation et le courant absorbé lorsque la tension à ses
bornes varie de 0 à 40V. La vitesse de la machine sera mesurée au moyen de la génératrice
tachymétrique placée sur son arbre. (Cette génératrice produit 6V pour une vitesse de rotation
de 1000tr.mn-1. On notera Vth la tension aux bornes de cette génératrice). Compléter le tableau
suivant :
Tension d'alim V (V) 5 10 15 20 25 30 35 40
Tension tachy Vth
Courant absorbé I0
D’après les relevés précédents remplir le tableau ci-dessous :
Vitesse de rotation
Ν
(tr/mn)
Vitesse de rotation
Ω
(rd/s)
Force contre-Electromotrice Em (V)
- A partir de ces mesures et connaissant la résistance r, tracer la courbe donnant la force
(contre)électromotrice de la machine en fonction de la vitesse. En déduire la constante de fem
ou de couple, k.

4
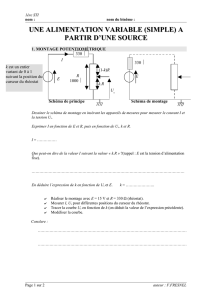
2- MONTAGE DU VARIATEUR DE VITESSE ET OBSERVATIONS A VIDE
Le hacheur série, commandé par modulation de largeur d'impulsion (M.L.I.), constitue une
"source de tension moyenne" réglable et à haut rendement, compacte et très souple
d'utilisation comme nous l’avons mis en évidence au TP précédent sur le convertisseur
abaisseur de tension.
On rappelle que le hacheur série est constitué d'un transistor MOS de puissance "IRF 540"
et d'une diode rapide de puissance "BYW 81 PI 200". Le transistor est protégé en courant au-
delà de 10A.
Remarque : Une mesure simple du rapport cyclique peut être réalisée en déplaçant la voie 1
de l'oscilloscope juste en sortie de la cellule hacheur. Cette remarque est valable pour toute
la suite du TP.
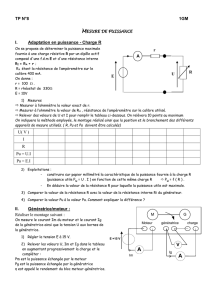
- Réaliser le montage de la Figure 4. Régler la source E à 40V et la fréquence de découpage à
10kHZ.
Le bobinage de l’induit (qui est au rotor pour une machine à courant continu) remplace
l’inductance utilisée dans le TP « Alimentation à découpage » et permet de lisser ainsi
naturellement le courant.
i
E
T
DCharge v
CC
Sonde de
courant
40V
Oscillo voie1
Oscillo voie2
masse oscillo (voie1)
masse oscillo (voie2)
V
A
Figure 4 : Variation de vitesse d'un moteur à Courant Continu et à aimants permanents
En régime de courant variable, le schéma équivalent du moteur de la Figure 3 doit être
complété par l'inductance L du circuit induit (c.f. Figure 5).
Figure 5
- Expliquer pourquoi l’inductance L n’a pas été prise en compte dans la Figure 3.
v(t)
i(t)
r
+
vL
L
Em

5
- Faire varier le rapport cyclique et observer la forme de la tension v et du courant i aux
bornes du moteur fonctionnant à vide. Pourquoi le courant présente-t-il une forme d'onde
triangulaire ?
- Quelle est l’influence de l’ondulation de courant sur les pertes par effet joule dans la
machine et le couple produit. Conclure.
- Faire varier le rapport cyclique et observer que la vitesse du moteur augmente. Commenter ?
3- FONCTIONNEMENT EN CHARGE
- Réaliser le montage de la Figure 6. Placer un rhéostat de 33Ω, réglé à sa valeur maximale,
en parallèle sur la seconde machine, qui fonctionne en génératrice. Insérer un ampèremètre
afin de mesurer le courant moyen dans ce rhéostat. L’ensemble (génératrice à courant continu
+ rhéostat variable) constitue pour le moteur M1 une charge mécanique variable.
- Quelle est la conséquence d’un courant I2 constant sur le couple de la génératrice M2 ?
- Ecrire le principe fondamental de la dynamique qui permet de dire que le couple C1 du
moteur M1 est égal au couple C2 de la génératrice. Quelles sont les hypothèses faites alors sur
la courroie.
Figure 6
- Faire 2 mesures pour 2 rapports cycliques différents en ajustant le rhéostat afin d’obtenir un
courant I2=1A.
- Conclure sur ces 2 points de fonctionnement. (Ajuste la puissance fournie)
- A partir du même montage, ajuster le rhéostat à 10 Ω.
Bilan de Puissance
Le rhéostat est réglé à 10Ω, déplacer l’ampèremètre et l’insérer afin de mesurer Is. Régler le
rapport cyclique à 0,8.
- Mesurer : Vs = Vth =
Is = V2 =
- Déterminer analytiquement, puis à partir des mesures précédentes :
• La puissance fournie par la source Pe ;
• La puissance fournie par le convertisseur Ps ;
• La puissance électromécanique de M1 PM1 ;
• La puissance électromécanique de M2 PM2 ;
• La puissance dissipée dans le rhéostat PRg .
 6
7
6
7
1
/
7
100%