Images Médicales 3D: Tomographie et

1
1
Images Médicales 3D:
Tomographie et Echographie
3D
Jean-Marie Rocchisani
ENSTA 2006
2
Tomographie et Echographie 3D
L'échographie est une
modalité
de l'imagerie
médicale
L'échographie fournit des images de coupe
(
tomographique
) d'un organe
L'échographie 3D
est une extension de
l'échographie classique
2D
L'échographie repose sur l'utilisation des
ultra-sons

2
3
Plan
Imagerie médicale et tomographie
les modalités d'imagerie
La tomographie en imagerie médicale
L'échographie 2D
Principes de l'échographie
L'échographie 3D:
motivations
Les dispositifs d'acquisition
le traitement des images
applications
4
Plan
Imagerie médicale et tomographie
les modalités d'imagerie (Généralités)
La tomographie en imagerie médicale
Scanner X
Tomographie d'émission
IRM
Echographie
La reconstruction tomographique
L'échographie 2D
L'échographie 3D:

3
5
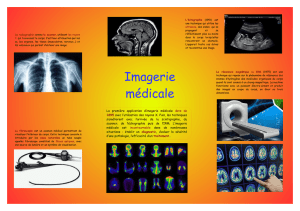
Les modalités d'imagerie
médicale
L'image médicale est une représentation sur
un plan projectif ou sectionnel d'un
paramètre physique ou physico-chimique
Procédés physiques:
Rayons X (radiologie, tomodensitométrie)
L'émission de rayonnement par des particules
radioactives (médecine nucléaire)
Le magnétisme des noyaux de proton(imagerie
par résonance magnétique)
Les ultrasons (ultrasonographie ou échographie)
6
Que faut-il voir à l'intérieur du corps
humain
La morphologie (Anatomie)
L'anatomie humaine est la description de la
structure du corps humain, de ses organes et de
leur position (anatomie topographique).
Les métabolismes
Le métabolisme est l'ensemble des
transformations moléculaires et des transferts
d'énergie qui se déroulent de manière
ininterrompue dans la cellule ou l'organisme
vivant.

4
7
IMAGERIE MEDICALE: Généralités
Formation de l'image
Techniques
Agent physique Interaction
avec la
matière Détection Image
Discipline
XRadiologie Radiologie conventionelle XR
Angiographie Numérisée DSA
TomoDensitoMétrie (scanner X) CT
Angioscanner CTA
gamma
Médecine Nucléaire
Scintigraphie
Tomographie par émission de simple photon SPECT
Tomographie par émission de positons PET
Magnétisme
Toutes/Radiologues
Imagerie par Résonance Magétique MR
Angio-IRM MRA
Ultra-sons Toutes Echographie US
Echo-Doppler Dupplex US
Abréviation (en)
Rayonnements
Agent Techniques
8
IMAGERIE MEDICALE: Classification
Par Agent Physique
Impédance, DiffuséEchostructureUltrastructureEchographie
Densité en protons
,T1, T2
SignalChamp MagnétiqueIRM
Concentration
radioactive
ActivitéRayons gammaMédecine Nucléaire
Coefficient
d'atténuation
DensitéRayons XRadiologie & TDM
Paramètre(s)
mesuré(s)
TerminologieAgent Physique

5
9
IMAGERIE MEDICALE: Classification
Par TYPE d 'IMAGE
Fonctionnelle (métabolique)Anatomique
Tomographique
Échantillonage d'un volume
2.5D, 3D, 3D+t
Projection planaire
2D, 2D+t
DynamiqueStatique
Electrique(EEG), Magnétique(MEG)Optique, Thermique
Echographie
Imagerie par Résonance
Magnétique Nucléaire ( IRM)
Tomographie d'Emission (SPECT,
PET )
Scintigraphie
TomoDensitoMétrie ( TDM )
Radiologie standard
Angiographie radiologique
TOMOGRAPHIQUEPLANE
10
IMAGERIE MEDICALE: Caractéristiques
Chélates de
Gadolinium
Indirect (Eau),
microbulles
NA
molécules
Iodées
molécules
Iodées
Contraste
Artificiel
±+
Echographie
++±
Médecine
Nucléaire
++
IRM
?+
TDM
-+
Radiologie
Numérique
Imagerie
Fonctionnelle
Imagerie
Anatomique
Modalité
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
1
/
69
100%