PROJET AVANCE

Berthier Florent 3ème année SE
Crenn Romain
Fabre Rémi
Lardoux Jessica
Rapport
Projet avancé :
DEVELOPPEMENT CONJOINT HW/SW SUR
CARTE XILINX ML507 SOUS LINUX EMBARQUE
Janvier 2013

Développement conjoint HW/SW sur carte Xilinx ML507 sous Linux embarqué
1 / 18
SOMMAIRE
CHAPITRE 1. Introduction ................................................................................................. 2
CHAPITRE 2. ENVIRONEMENT DE TRAVAIL ........................................................................ 3
2.1 La carte Xilinx Virtex-5 ML507 ................................................................................................. 3
2.2 Communications ...................................................................................................................... 4
2.3 Présentation du Timer 64 bits ................................................................................................. 5
CHAPITRE 3. Développement du Projet ............................................................................. 7
3.1 TP 1: Mise en place de l’environnement de travail ................................................................. 7
3.2 TP 2 : Modification de l’architecture matérielle ..................................................................... 8
3.3 TP 3 : Test logiciel du timer. .................................................................................................. 15
CHAPITRE 4. Conclusion .................................................................................................. 17
CHAPITRE 5. Publications........................................................ Error! Bookmark not defined.
CHAPITRE 6. ANNEXES .................................................................................................... 18

Développement conjoint HW/SW sur carte Xilinx ML507 sous Linux embarqué
2 / 18
CHAPITRE 1. Introduction
Dans le cadre d’un « grand TP » qui ferait la synthèse de tous les enseignements de l’option
SE, il convient de mettre en œuvre un environnement de développement conjoint HW/SW
sur carte Xilinx Virtex-5 ML507 avec les outils Xilinx ISE sous Linux embarqué.
Il convient d’intégrer dans un premier temps un bloc IP fourni (timer 64 bits) dans un design
de référence SoPC puis régénérer le fichier de programmation du circuit FPGA Virtex-5 de la
carte ML507. On testera le périphérique ainsi intégré. On intégrera ensuite ce nouveau
design dans le portage Linux embarqué pour la carte ML507 (fichier DTS Device Tree). On
développera ensuite le driver Linux d’accès au timer 64 bits puis on créera une application
Linux de test du timer utilisant le driver. Le rapport du projet sera écrit dans l’esprit d’en
faire le support du « grand TP ».

Développement conjoint HW/SW sur carte Xilinx ML507 sous Linux embarqué
3 / 18
CHAPITRE 2. ENVIRONEMENT DE TRAVAIL
2.1 La carte Xilinx Virtex-5 ML507
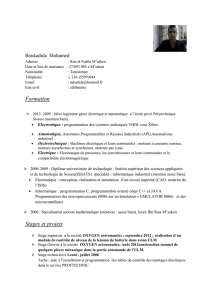
Au court de ce projet nous avons travaillé sur la carte d’évaluation ML507 de chez Xilinx dont
voici les caractéristiques.
La carte ML507 Evaluation Platform contient:
- FPGA Virtex 5
-Tri-Speed Ethernet
-Port de configuration JTAG
-Port série RS-232
-16 Character x 2-Line LCD
Le FPGA Virtex 5:
-11200 slices
-820 KB RAM
-1 microprocesseur Power PC 440
-son horloge est cadencée à 100MHz
Caractéristiques du Power PC 440:
-Processeur superscalaire 32 bit à architecture RISC
-Micro-architecture pipeliné à 7 étages
-32 KB de cache instruction
-32 KB de cache data
-Plusieurs bus de communication embarqué (PLB: Processor Local Bus)
-Interface de debug JTAG

Développement conjoint HW/SW sur carte Xilinx ML507 sous Linux embarqué
4 / 18
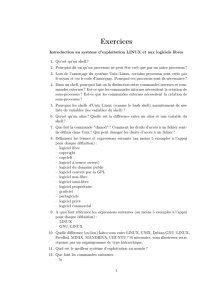
2.2 Communications
Figure 1 : Schéma Hardware du projet
FPGA
PowerPC
PLB Bus
Virtex 5
JTAG port
Ethernet
PC
Platform Cable
USB
ML507 Evaluation Platform
RS-232 Serial Port
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%