Rapport acceleration parasite AR

Par “SDVS”
Rapport concernant l’effet de chaine ou IUWA
I/ Problème :
Le débattement de suspension engendre une variation de tension de chaine
entrainant lors de certaine phase des accélérations induites indésirables. Le but de l’étude
est de déterminer pour un cas donné, l’ampleur de ces variations.
II/ Démarche de l’étude :
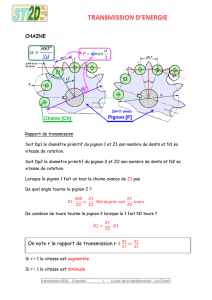
Sur la base d’une photographie plan d’un Yamaha R1 endurance GMT94 inséré sous
le logiciel CAO Catia V5, l’architecture de train arrière à été modélisé simplement au travers
d’un schéma cinématique sur le claque de la géométrie réel.
Hypothèses :
- Les pignons et couronnes sont représentés par leurs diamètres nominaux.
- Le pignon de sortie de boite est considéré fixe (car considéré à vitesse de rotation
constante)
- Le brin supérieur de chaine est supposé constamment tendu
- L’enroulement de chaine est supposé tangent aux raccordements des
couronne/pignon
La démarche consiste à faire varier le débattement du bras oscillant afin de mesurer la
variation de longueur du brin tendu de chaine.
Interprétation :
- Dans le cas ou la longueur du brin tendu de chaine croit, il y a création de forces
induites qui entrainent un déplacement angulaire de la roue.
- Dans le cas ou la longueur du brin tendu de chaine décroit, il y a diminution de la
tension de chaine. Cependant on peut penser que la vitesse de rotation du pignon
de sortie de boite permet la remise en tension automatiquement.

Par “SDVS”
III/ Etude expérimentale :
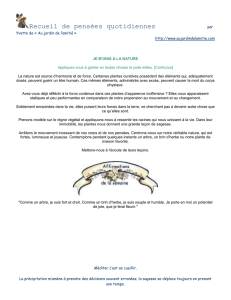
A - Cas classique Pignon/couronne :
Encadré rouge : variable ; Encadré bleu: valeur observée

Par “SDVS”
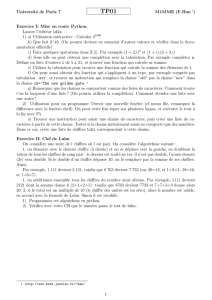
débattement BO (mm) L brin tendu (mm) Variation delta L Variation périmètre roue (mm)
0
671,276
0
0
10
671,38
0,104
0,298763636
20
671,462
0,186
0,534327273
30
671,521
0,245
0,703818182
40
671,558
0,282
0,810109091
50
671,572
0,296
0,850327273
60
671,564
0,288
0,827345455
70
671,534
0,258
0,741163636
80
671,482
0,206
0,591781818
90
671,408
0,132
0,3792
100
671,312
0,036
0,103418182
Interprétation :
Phase compression :
De 0 vers 50 mm :
On observe qu’il a augmentation de la longueur du brin de chaine entrainant
la rotation de la roue. Ceci se traduit par des accélérations positives
De 50 vers 100 mm :
On observe une diminution de la longueur du brin de chaine, ce qui n’entraine
pas d’accélération induite à la roue mais une diminution de la tension du brin
supérieur de chaine qui selon les hypothèses posées, est automatiquement remit en
tension grâce au pignon de sortie de boite.
671,25
671,3
671,35
671,4
671,45
671,5
671,55
671,6
0 50 100 150
L brin tendu (mm)
débattement BO (mm)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
0 50 100 150
Variation périmètre roue (mm)
débattement BO (mm)

Par “SDVS”
Phase de détente :
De 100 vers 50 mm :
Cette phase en détente entraine une augmentation de la longueur de brin
tendu de chaine -> Accélérations positives
De 50 vers 0 mm :
Cette phase est en diminution de la longueur du brin de chaine -> pas
d’accélération induite -> remise en tension par le PSB
B - Cas pignon/roue/couronne: (type proto Tecmas V2)

Par “SDVS”
Encadré rouge : variable ; Encadrés bleu: valeurs observées
débattement
BO (mm) L brin tendu (mm)
Variation
delta L
Variation
périmètre
roue (mm)
section 1
(mm)
section
2 (°)
section 2
(mm)
section 3
(mm)
Somme
(mm)
0
225,372
19,948
38,29741
438,288
701,9574
0
0
10
225,452
19,58
37,59090
438,288
701,3309
-0,626509
-1,799790
20
225,513
19,215
36,89015
438,288
700,6911
-1,266258
-3,637616
30
225,558
18,851
36,1913
438,288
700,0373
-1,920088
-5,515891
40
225,586
18,489
35,49633
438,288
699,3703
-2,587078
-7,43197
50
225,597
18,129
34,80518
438,288
698,6901
-3,2672293
-9,385858
60
225,591
17,77
34,11595
438,288
697,9949
-3,962459
-11,3830
70
225,568
17,413
33,43056
438,288
697,2865
-4,670850
-13,41807
80
225,529
17,058
32,74900
438,288
696,5660
-5,391401
-15,48802
90
225,472
16,704
32,06937
438,288
695,8293
-6,128032
-17,60416
100
225,399
16,351
31,39166
438,288
695,0786
-6,878744
-19,76075
 6
7
6
7
1
/
7
100%