TP TRAITEMENT D`IMAGES

Unité Optionnelle Robotique et Vision 1
Licence EEA – Module Optionnel Automatique
VISION
Objectif des manipulations de Vision
L'objectif des manipulations est d'aborder plusieurs aspects qui pourront conduire aux
applications de traitement d’images dans divers domaines, dont la robotique :
- les aspects matériels de la prise de vue par caméra d’une scène réelle
- l'évaluation de la qualité du signal "image" et ses propriétés
- les traitements en vue de l'amélioration de l'image ou de son analyse
Les deux manipulations se font sur un logiciel dédié à cette discipline. Il s’agit d’un logiciel libre
disponible sur Internet : Image Analyser de Meesoft (http://meesoft.logicnet.dk).
La rédaction de ce polycopié alterne les présentations avec les travaux à réaliser, de façon à
mettre en application directement les concepts énoncés. La préparation des manipulations consiste donc
à lire avec soin le texte avant la manipulation et à confronter les problèmes posés avec le Cours et les
Travaux Dirigés.
Compte-rendu
Les résultats des manipulations pourront être présentés en traitement de texte (Open Office qui
est gratuit et avec lequel ce polycopié a été rédigé), en utilisant le plus souvent possible la fonction
"copier-coller" sous Windows. Pour assurer une bonne lisibilité au compte-rendu, il est souhaitable de
limiter le volume du document à une dizaine de pages maximum, en réduisant fortement la taille des
images (une page peut contenir 8 images sans aucune difficulté de lecture!).
Il est impératif de sauver périodiquement le compte-rendu. Le compte-rendu sera sauvé sur le
répertoire personnel de l'étudiant sur le réseau (chaque étudiant de Licence possède un compte sur les
machines du P2 depuis le semestre S5)
Important: le compte-rendu ne se limite pas à un simple "collage" des images. Le compte-rendu
donnera toutes justifications scientifiques aux résultats. Tout résultat non-justifié sera considéré
comme nul.
USTL - Licence E.S.E.A. – 2011-2012

Unité Optionnelle Robotique et Vision 2
Manipulation de vision n° 1
PRISE EN MAIN
et
ANALYSE DU "SIGNAL IMAGE"
I - LE MATERIEL D'ACQUISTION
La caméra est un modèle industriel possédant un capteur du type CMOS (Complementary Metal
Oxide Semiconductor) Couleur, de dimension 1/3 pouce et de résolution 752 x 480 pixels ; elle est
munie d'un objectif à focale variable Varizoom pour adapter le grandissement.
Cet objectif n'étant pas un véritable zoom; les réglages 'focale' et 'distance' ont une influence
mutuelle; le réglage optique se fait par action conjointe sur les deux bagues. L'objectif possède aussi
une bague de réglage du diaphragme (ouverture de l'objectif). Le principal défaut de cette famille
d'objectif est la distorsion géométrique (l'image d'un droite est une courbe) ; ce défaut est très fortement
perçu par l'observateur.
Figure 1 – Caméra et objectif utilisés en manipulation
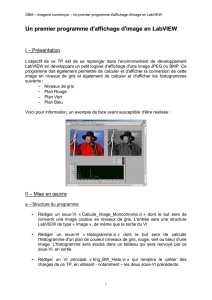
La caméra est fixée verticalement sur un statif ; sa hauteur est réglable par l'utilisateur. La prise
de vue est un choix optimal entre hauteur et focale du zoom. Ne pas hésiter à modifier ces paramètres
pour obtenir une image présentant peu de distorsion géométrique.
Figure 2 – Le banc d'acquisition d'images
USTL - Licence E.S.E.A. – 2011-2012

Unité Optionnelle Robotique et Vision 3
La caméra est reliée à un micro-ordinateur par liaison USB qui assure l'alimentation de la
caméra et le transfert des données. Elle possède un fonctionnement très largement paramétrable
contrairement à une simple Webcam. Les principales fonctions de réglage de la caméra sont accessibles
par l'intermédiaire d'un driver TWAIN (signifie deux en anglais littéraire, pour symboliser la relation
entre deux objets). Ce driver permet de faire le lien entre la caméra et un logiciel classique (traitement
de texte par exemple) en vue d'insérer une image sans quitter le logiciel principal.
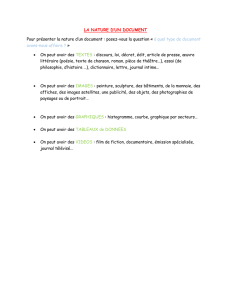
Le driver TWAIN présente l'écran suivant :
Figure 3 – L'écran du driver TWAIN
Les réglages fondamentaux d'une caméra sont :
- le choix du mode de fonctionnement Noir&Blanc (grayscale) ou Couleur . Pour la
manipulation, le mode N&B sera impérativement choisi (utilisation de la notion de niveau de gris
exclusivement)
- le temps d'exposition: pour former l'image, l'énergie lumineuse est transformée en charges
électriques qui sont accumulées par chaque pixel. L'amplitude du signal est directement proportionnelle
à la quantité de charge intégrées pendant l'exposition du capteur à la lumière.
La quantité de charge accumulées dépend aussi de l'ouverture de l'objectif (bague marquée avec
les lettre O [Open] et C [Close] ). L'utilisateur doit adapter le temps de pose et l'ouverture en fonction
des conditions lumineuses de la scène, comme pour un appareil photographique.
Un temps de pose long (30ms max) est la garantie d'une quantité de charge importante et d'un
faible niveau de bruit. Si cette quantité dépasse le maximum toléré par le capteur (saturation dans le
blanc appelé brûlage de la photo), fermer davantage le diaphragme pour limiter la quantité de lumière.
Une prise de vue rapide n'est utile que pour les scènes dynamiques en mouvement (pas le cas du TP).
- le gain d'amplification ou Master Gain . C'est le facteur d'amplification du signal électrique
avant conversion numérique . La valeur 100% correspond à une amplification maximale et 0% au
minimum. On peut envisager de baisser le gain plutôt que de fermer le diaphragme lorsque le signal est
saturé.
Pour faciliter la prise de vue, il est possible de sélectionner le mode AES [Automatic Exposure
System] qui ajuste le blanc à la valeur maximale sans saturation et le mode AGC [Automatic Gain
Control] qui ajuste le gain au signal maximal.
USTL - Licence E.S.E.A. – 2011-2012

Unité Optionnelle Robotique et Vision 4
- le Gamma est le coefficient de la fonction de compensation visuelle non-linéaire. Pour les
mesures de ce TP, laisser le coefficient à 1 (fonction linéaire)
- le contraste est un facteur de gain supplémentaire après mesure du niveau de gris. La valeur à
placer pour une mesure correcte d'environ 100.
- la lumière ou Brightness est une correction du niveau de gris par addition (ou soustraction)
d'une valeur constante. La valeur à définir pour ne pas avoir de correction est 100.
Pour chaque prise de vue, il conviendra de vérifier les valeurs de ces paramètres; le réglage
fondamental sera celui de la bague de diaphragme (et de la netteté!).
II - LE LOGICIEL Image Analyser
Image Analyser (IA par la suite) est un logiciel de visualisation et de traitement d'image qui
s'exécute sous l'environnement WINDOWS. Sa particularité est d'adopter un vocabulaire scientifique
pour décrire les traitements, et non un vocabulaire grand public. La correspondance avec le cours et les
TD est très directe. La seule difficulté est l'absence de documentation (voir page MeeSoft). La majorité
des opérations utilisées dans ce TP possède une description sur Wikipédia (consultable en séance).
1) Types d'images sous IA
Le logiciel IA permet de gérer les différents d'images usuellement rencontrés. Suivant le format,
certaines opérations ne sont pas accessibles.
image 8 bits à niveaux de gris par défaut.
image indexée : format utilisé dans le stockage type TIF par exemple. Les valeurs des
pixels correspondent à un code de couleur stocké dans une table (palette).
image couleur 3x8 bits : L'affichage est directement en couleur. Les images composantes
accessibles par "éclatement" de l'image RVB en 3 images indépendantes.
IA possède toutes les fonctions nécessaires pour passer d'un type à un autre. Bien remarquer
que les opérations usuelles du traitement d'image sont définies pour des images à niveaux de gris 8 bits.
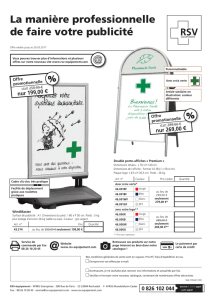
Pour gérer certains calculs, le logiciel possède un format spécifique appelé Map ; ce format est
utilisé les résultats complexes, comprenant une partie réelle signée et une partie imaginaire signée
(transformée de Fourier par exemple). Une boîte de dialogue spécifique permet d'afficher dans la fenêtre
de visualisation un paramètre particulier de la structure complexe (amplitude, phase...).
Figure 4 – Manipulation des images "Map"
Ce type ne sera pas exploité dans les manipulations de licence.
USTL - Licence E.S.E.A. – 2011-2012

Unité Optionnelle Robotique et Vision 5
2) L'acquisition TWAIN
L'acquisition d'images TWAIN est accessible depuis le menu "Fichier" du logiciel IA.
Travail à faire: Prise en main du Driver uEye
• Placer l'image Lena sous le statif
• Lancer le logiciel Image Analyser, puis menu "Fichier" puis " Source Twain", choisir la
caméra uEye.
• Lancer le menu "Fichier" puis "Acquisition d'Image" . La fenêtre du driver s'affiche
• Paramétrer l'acquisition :
- Noir&Blanc : Y8
- Brightness : 100
- Contast : 100
- Exposure : 33ms
- Master Gain : 0%
• Choisir le mode "Live" (par opposition, le bouton affiche "Still
Image" lorsque le mode "Live" est activé)
• Régler la caméra pour obtenir une image de bonne qualité de Lena (ouverture, focale et
mise au point
• Geler l'image par
• Pour visualiser un pixel particulier, pointer la souris ; les coordonnées et les valeurs
RGB sont affichées en bas de la fenêtre.
• Sélectionner l'outil zoom . A chaque fois que vous cliquez le bouton gauche (resp.
droit) de la souris, vous zoomez (resp. dézoomez) l'image , le centre géométrique de
l'opération est le pixel pointé par la souris..
• Le mode de sélection définit graphiquement une zone qui pourra être copiée dans
le presse-papier puis réutilisée sous IA ou d'autres logiciels (copie de certains écrans d'IA
vers Office..).
3) Enregistrement/Chargement de l'image
• Enregistrer l'image en format TIF (Tagged Image File), JPEG (Joint Photograph Expert
Group) et BMP (BitMap Microsoft) dans un répertoire créé sur votre compte (il est
strictement interdit de stocker les images dans un répertoire du disque C: des machines )
• Avec l'Explorateur de fichiers Windows, visualisez la taille de chaque sauvegarde.
Comparez la taille du fichier au nombre total de pixels de l'image. En déduire quel est le
type de sauvegarde le plus compact
• Discuter de l'intérêt de chacun de ces modes de stockage après documentation sur
Wikipédia
USTL - Licence E.S.E.A. – 2011-2012
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%