réf

1
CHAPITRE II
VARIABILITE DES PRINCIPALES VARIABLES
MELANGE et STABILITE DES MASSES D’EAU
II.1 Introduction
Le concept de variabilité des grandeurs physiques caractérisant l’océan est un sujet très
vaste. Il existe en effet des variabilités spatiales et temporelles aux petites, moyennes et
grandes échelles. La variabilité aux petites échelles, souvent assimilée à de la turbulence
(agitation désordonnée), sera discutée brièvement dans le chapitre traitant des courants
de surface engendrés par le vent.
Dans ce chapitre sera présentée la variabilité de la température, de la salinité et de la
couverture de glace aux grandes échelles temporelles (temps caractéristique supérieur à
un jour) et spatiales (longueur caractéristique horizontale supérieure à 100 km et
verticale à une centaine de mètres).
II.2 Variabilité spatiale et temporelle de la température
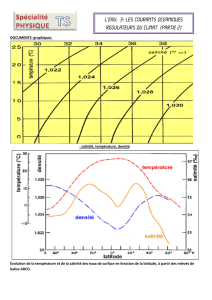
Les valeurs caractéristiques du champ de température sont relativement bien connues et
données au Tab.II.1. Elles sont obtenues par le traitement de données déduites, soit de
mesures directes basées sur l'utilisation de thermomètres ou de sondes CTD
(conductivité, température, profondeur), soit de mesures radio-métriques effectuées à
partir d'avions ou de satellites.

2
Tableau II.1 Températures annuelles moyennes des couches superficielles de
l'océan. (Extrait de Sverdrup et al., 1970).
La variabilité spatiale et/ou temporelle de la température dans les couches superficielles
de l'océan dépend en grande partie de la latitude. Suivant la verticale, les températures
décroissent rapidement dans les couches superficielles de l'océan, surtout aux latitudes
moyennes, ensuite la décroissante est moins forte.
Figure II.1 Températures superficielles annuelles moyennes.
(Extrait de Alexander et Mobley, 1976)

3
Une coupe verticale dans la partie ouest de l'océan Atlantique (Fig.II.2) donne une idée
plus précise de la structure spatiale du champ des températures. Les couches supérieures
des océans sont sensibles aux variations temporelles et spatiales des flux énergétiques à
l'interface air-mer. Les vents mélangent ces couches et conduisent à une
homogénéisation partielle ou complète.
Figure II.2 Distribution de la température dans la partie ouest de l’océan
Atlantique. (Extrait de Brown et al., 1989)
La Fig.II.3 présente les structures verticales de température à différentes latitudes et
l’évolution temporelle du profil vertical de T au cours d’une année.
Une couche de surface bien mélangée (mixed surface layer) se forme : de l’ordre de 200
à 300m aux latitudes moyennes (Fig.II.3). L’épaisseur de la couche dépend de sa
position géographique (longitude et latitude). Juste au-dessous de la « mixed layer » les
variations verticales de température sont très grandes et la zone caractérisée par ces
maxima de gradient constitue la thermocline principale (Fig.II.3). Au-dessous de la
thermocline principale, les variations temporelles et spatiales de la température sont
faibles. Le temps de résidence de l'eau est supérieur à un siècle dans les couches
profondes de l'océan.
Aux latitudes moyennes, la variabilité temporelle des flux énergétiques est importante et
une thermocline saisonnière s’installe en été dans la couche de surface mélangée (mixed
surface layer) et disparaît en hiver.

4
Figure II.3 a) Profils verticaux de la température à différentes latitudes.
b) Evolution temporelle de la température dans la couche de surface aux
latitudes moyennes. (Extrait de Brown et al., 1989)
L’analyse de coupes transversales telles que celle présentée à la Fig.II.2 se fera dans le
cadre «océanographie descriptive » du cours d’océanographie physique.
II.3 Variabilité spatiale de la salinité
A part les régions estuariennes et certaines franges littorales, la salinité de l'eau de mer
varie dans de faibles proportions. Des valeurs anormalement hautes sont observées en
mer Rouge où elle dépasse 40. Les figures II.4 et 5 donnent les variabilités spatiales
verticale et horizontale de la salinité. La distribution spatiale de la salinité est reliée aux
phénomènes d’évaporation et de précipitation.

5
Figure II.4 Salinité moyenne dans une section verticale de la partie ouest
de l'océan Atlantique. (Extrait de Brown et al., 1989)
Figure II.5 Distribution de la salinité annuelle moyenne.
(Extrait de Brown et al., 1989)
Remarques
- Des eaux très salées flottent au-dessus d’eaux moins salées dans les régions
tropicales.
- On observe la formation d’eaux profondes dans les régions proches du
Groenland.
- La structure verticale de salinité (ou température) ne peut s’expliquer
complètement sans tenir compte des effets thermique (ou halins) et de la
stabilité de la colonne d’eau.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%