Institut National des Sciences Appliquées de Toulouse BE Systèmes

Institut National des Sciences Appliquées de Toulouse
BE Systèmes Autonomes
FOLLOW THE LINE
an autonomous robot project
Badr Bouaddi <[email protected]>
Simon Bouvot <[email protected]>
Brice Cavelier <[email protected]>
Yassine Chemchoum <[email protected]>
Héléna Creixell <[email protected]>
Florent Dallet <[email protected]>
Encadrant : Christophe Escriba
Fonctions Noms Date Signature
Software Bouaddi/Dallet 12/01/14
US Bouvot/Cavelier 11/01/14
IR Chemchoum/Creixell 12/01/14

Table des matières
1 Ultrason 3
1.1 Emission.............................................. 3
1.1.1 Montage oscillateur à base de NE555 . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Dimensionnement .................................... 3
1.2 Réception ............................................. 4
1.2.1 Chaineamplificatrice................................... 4
1.2.2 Détecteurdecrête .................................... 4
1.2.3 Lecomparateur...................................... 6
1.2.4 Conditionnement du signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Infrarouge 7
2.1 Présentation............................................ 7
2.2 Principedefonctionnement ................................... 7
2.3 Emission.............................................. 7
2.3.1 Générateur du signal carré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.2 Amplification et conversion du signal . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Réception ............................................. 9
2.4.1 Conversion, filtrage et écrêtage du signal . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.2 Comparateurhystérésis ................................. 10
3 Software côté microcontrôleur PIC18f2580 11
4 Software embarqué sur le PC 13
4.1 UneIHM ............................................. 13
4.1.1 Développement de driver des commandes de robot portables . . . . . . . . . . . . 13
4.1.2 Développement d’IHM sous python . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2 Commandesdurobot ...................................... 16
2

Chapitre 1
Ultrason
1.1 Emission
1.1.1 Montage oscillateur à base de NE555
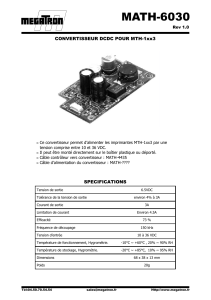
Le montage émetteur doit osciller à 40kHz, pour cela on utilise un NE555 (ou équivalent LM555)
monté en astable qui génère un signal rectangulaire d’amplitude 5V. Le montage suivant a été réalisé.
Figure 1.1 – Montage astable
La documentation constructeur nous propose les 2 relations suivantes afin de calculer le rapport cyclique
et la fréquence d’oscillation.
f=1.44
(RA+ 2 ·RB)·CD=RB
RA+ 2 ·RB
1.1.2 Dimensionnement
On veut une fréquence f= 40kHz et un rapport cyclique de D= 50%. En utilisant les formules
proposées, on trouve le compromis suivant :
D=22k
1.65k+ 2 ·22k= 48.2% f=1.44
(1.65k+ 2 ·22k)·(820p)= 38.5kHz
3

BE Systèmes Autonomes INSA Toulouse
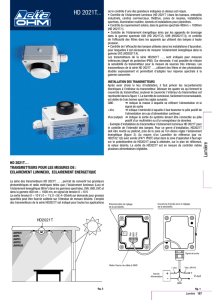
Figure 1.2 – Montage oscillateur à 40kHz
On note qu’après avoir réglé manuellement grâce à un potentiomètre la valeur de RA= 1.65kΩ, on met
2 résistances de 3.3kΩen parallèle. On installe en sortie de l’oscillateur un montage émetteur commun
pour amplifier le signal émis.
1.2 Réception
1.2.1 Chaine amplificatrice
Le récepteur capte le signal à 40kHz émis. Un suiveur est installé ensuite pour adapter l’impédance.
S’en suit deux amplificateurs inverseurs de gains :
G1=−220
20 = 11 G2=−47k
1k= 47
Soit une amplification de 517 (54dB). On a placé 2 AOP pour respecter le produit gain-bande G·B≤
3M, en effet :
G1·B1= 11 ·40k= 440k < 3M G2·B2= 47 ·40k= 1.88M < 3M
Figure 1.3 – Chaine amplificatrice
1.2.2 Détecteur de crête
Après la chaîne d’amplification se trouve un détecteur de crêtes, montage composé d’une diode et de la
mise en parallèle d’une résistance et d’un condensateur. Le principe consiste détecter la valeur maximale
du signal sinusoïdale. Cette valeur sera exploitée en sortie du montage avec un comparateur.
5ESE - groupe 2 Page 4/ 27 20 janvier 2014

BE Systèmes Autonomes INSA Toulouse
Pourquoi ce montage ? Si le signal de l’émetteur rencontre un obstacle, il sera réfléchit puis capté
par le récepteur. En sortie de la chaîne d’amplification, on aura alors un signal identique au signal émit
mais avec une amplitude différente. L’amplitude sera en fait l’image de la distance de l’obstacle. Plus
l’obstacle est loin, plus l’amplitude sera petite. Étant donné que nous souhaitons réaliser un détecteur
tout ou rien (un obstacle ou pas d’obstacle), nous allons prélever la valeur de l’amplitude du signal, puis
la comparer à une valeur Vref, qui sera réglable avec un potentiomètre. Ainsi, on pourra régler la distance
de détection.
Figure 1.4 – Détecteur de crête
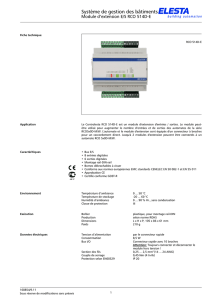
Voici le signal avant et après le détecteur de crêtes :
Figure 1.5 – Signal avant et après détection
On remarque que pour une amplitude de 12V, on obtient un signal constant de 11,3V. La différence
est due à la tension de seuil de la diode. Pour confirmer le fonctionnement de notre détecteur, on change
la valeur du signal d’entrée.
5ESE - groupe 2 Page 5/ 27 20 janvier 2014
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%