Comparaison des performances électriques d`un onduleur

N°ordre : 41186 Année 2013
THÈSE
présentée pour obtenir le grade de
DOCTEUR de l’université de Lille 1
Spécialité : « Génie Electrique »
Préparée au Laboratoire d’électrotechnique et d’électronique de puissance de Lille
Dans le cadre de l’Ecole Doctorale SPI 072
« PRES Université Lille Nord de France »
présentée et soutenue publiquement
par
Sophie FERNANDEZ
le 11 Octobre 2013
Comparaison des performances électriques d’un onduleur
triphasé deux niveaux à commandes directes et indirectes
connecté au réseau
Jury composé de :
M. LORON Luc Professeur des universités - IREENA Rapporteur
M. GAUBERT Jean-Paul Professeur des universités - ENSIP Rapporteur
M. LEMBEYE Yves Professeur des universités - G2Elab Examinateur
M. LE MOIGNE Philippe Professeur des universités - L2EP Directeur de thèse
M. DELARUE Philippe Maitre de conférences - L2EP Co-Directeur de thèse
M. LACARNOY Alain Schneider-Electric-APC Invité




1
Introduction
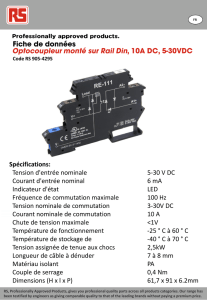
Le raccordement, de plus en plus répandu pour des raisons écologiques, économiques,
sociologiques, des sources de production d’énergie décentralisées renouvelables au réseau électrique
Basse Tension implique l’utilisation de convertisseurs de puissance. Selon la source, diverses chaines
de conversion sont utilisées. Dans tous les cas, l’étage de sortie est similaire et est constitué d’un
onduleur de tension entièrement commandé, fonctionnant en mode onduleur avec injection de courant
sinusoïdal sur le réseau dans ce cadre d’application (Figure 1). Il est alimenté par un bus de tension
continu (U), avec en entrée une source de puissance dont la nature dépend du système considéré.
Figure 1: Raccordement d’une source de puissance au réseau
Le niveau de puissance électrique que produisent ces centres de production tend à augmenter. Pour
tenter de concurrencer les sources de production centralisées (autrement dit principalement issues
d’énergie fossile ou nucléaire), les sources décentralisées (type éolien ou photovoltaïque….) sont
souvent regroupées sous forme de ferme atteignant des niveaux de puissance élevée (la plus grande
centrale photovoltaïque au sol en exploitation est celle de 100 MW de Perovo en Ukraine). La qualité
des grandeurs électriques en sortie des convertisseurs représente le critère principal de choix de ces
dispositifs. Etant donné les fortes puissances mises en jeu, le nombre de sources raccordées et le coût
de l’énergie, le rendement devient également un facteur de tout premier plan.
Les distributeurs d’énergie imposent des conditions particulières pour le raccordement des centres
de production d’énergie décentralisés à leur réseau de distribution d’énergie afin de garantir la stabilité
et la qualité du réseau. Ces normes électriques se traduisent par des conditions de fonctionnement
particulières de ces convertisseurs et notamment la qualité des courants injectés sur le réseau.
Le travail présenté dans ce mémoire a pour objectif d’agir sur le rendement de cet onduleur, donc
d’agir sur les pertes de ce dernier, tout en gardant une qualité des grandeurs électriques en sortie
satisfaisant aux conditions de raccordement au réseau.
Pour agir sur le rendement d’un convertisseur on peut influer principalement sur :
DC
AC
Convertisseur
connecté au réseau
U
Puissance électrique
Source
de
puissance
Conversion
électrique Réseau
BT
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
1
/
175
100%