CONVERSION DE PUISSANCE

Spé ψ 2005-2006 page 1/6 Devoir n°6
Spé ψ 2005-2006 Devoir n°6
CONVERSION DE PUISSANCE
Partie I
MOTEUR A COURANT CONTINU COMMANDE PAR UN HACHEUR
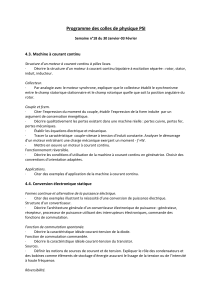
On rappelle (figure 1) le schéma équivalent du moteur à courant continu à excitation séparée : u
représente la tension aux bornes de l’induit (rotor), i l’intensité du courant le traversant.
I-1) Étude du moteur à courant continu
Le moteur étant soumis à un couple résistant constant CR = 60 N.m , un essai
réalisé avec u = 120V a donné les résultats suivants :
Ÿ f.é.m. E = 100 V ; Ÿ vitesse de rotation Ω = 3200 tours.mn–1.
Le moment d’inertie de la partie mobile entraînée par le moteur vaut
J = 1,5 kg.m2 et la relation entre la vitesse de rotation du moteur et la vitesse v du véhi-
cule est Ω = λv avec λ = 35 tr.mn–1/(km.h–1).
a) Rappeler les relations (expressions littérales puis numériques) existant entre les gran-
deurs électriques E et i et mécaniques Ω et C (C = couple moteur) ; pour les expressions numériques,
on précisera les unités employées pour E, i, Ω et C.
b) Déterminer la valeur de R, résistance de l’induit.
c) On considère un fonctionnement à couple moteur C constant (C = 60 N.m) et on étu-
die la phase de « mise en vitesse » d’un véhicule sur une route horizontale. Le moment du couple ré-
sistant varie alors suivant une loi du type CR = aΩ + b avec a = 0,01 N.m/(rad.s–1) et b = 5 N.m.
Calculer le temps ∆t1 mis par le véhicule pour passer de 0 à v = 50 km/h.
I-2) Commande par hacheur
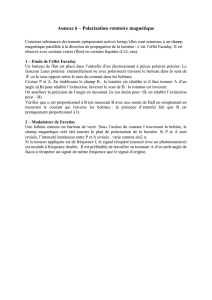
Pour alimenter le moteur à courant continu à par-
tir d’une source (batteries) délivrant une tension continue
fixe E0, on réalise le montage à deux interrupteurs K1 et
K2 de la figure 2. Une bobine d’inductance L est placée
en série avec le moteur. La résistance de la bobine est
négligée.
Les interrupteurs K1 et K2 sont supposés idéaux.
a) Qu’est-ce qu’un « interrupteur idéal » ?
b) Quel est le rôle de la bobine
d’inductance L dans ce montage ?
c) Préciser les états de fonctionnement autorisés pour les interrupteurs K1 et K2 compte
tenu de la nature de la source et de la charge du hacheur (on justifiera en rappelant les règles
d’association des sources auxquelles il faut faire référence) .
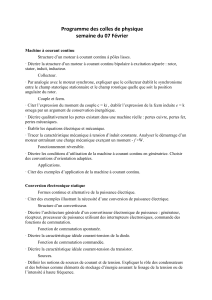
I-3) On considère dans tout ce qui suit un fonctionnement en régime périodique établi de pé-
riode T. On considèrera de plus que la résistance R de l’induit est négligeable et que la f.é.m. E est
toujours positive. L’oscillogramme de la figure 3 fournit un relevé de tensions effectué alors que la
source E0 fournit une puissance P = 3 kW.
Ÿ La voie 1 représente la tension V.
Ÿ La voie 2 représente la tension obtenue par une sonde de courant : cette tension est
proportionnelle à l’intensité i du courant traversant le moteur (sensibilité de la sonde : 1 volt par am-
père).
i
R
E
u
figure 1
E0
K1
u
i
R
E
L
MOTEUR CC
K2
iK1
iK2
SOURCE
V
figure 2

Spé ψ 2005-2006 page 2/6 Devoir n°6
On s’intéresse au fonctionnement sur une période entre les instants 0 et T. On note αT l’instant
de commutation à partir duquel la tension V vaut 0 (V = 0 pour αT ≤ t < T).
a) Représenter le circuit électrique (comprenant le moteur à courant continu) qui équi-
vaut au montage de la figure 2 dans chaque phase de fonctionnement (0 ≤ t < αT d'une part et
αT ≤ t < T d'autre part).
b) Écrire les équations d’évolution i(t) de l’intensité du courant en fonction du temps (on
notera IMIN et IMAX les valeurs minimale et maximale de i) :
α) pour 0 ≤ t < αT ;
β) pour αT ≤ t < T ;
c) Représenter rapidement, sur des figures distinctes, les graphes de iK1 et iK2 en fonction
du temps. d) Déduire de l’oscillogramme de la figure 3 et des conditions de réalisation de l’essai
correspondant (il ne s’agit pas de l’essai initial pour lequel E = 100 V mais de celui présenté à la ques-
tion I-3) : α) la valeur de E0 ;
β) la valeur de α correspondant à l'essai réalisé ;
γ) la valeur de E correspondant à l'essai réalisé ;
δ) la valeur de L ;
ε) la valeur moyenne <iK1> du courant débité par la source E0 ;
φ) la valeur moyenne <i> du courant circulant dans l’induit.
e) Dans le cas d’un moteur à courant continu réel (si on prend en compte la résistance
R), pourquoi a-t-on intérêt, pour améliorer le rendement, à limiter l’ondulation du courant dans l’induit
(c'est-à-dire à limiter les variations du courant autour de sa valeur moyenne) ?
Partie II
PRINCIPE DU MOTEUR SYNCHRONE
II-1) Entraînement du rotor du moteur synchrone
La partie mobile du moteur synchrone (rotor) est constituée d’un bobinage alimenté par un cou-
rant continu et assimilable à un aimant de moment magnétique
r
M
, de module M0 constant. On suppose
que
r
M
est animé dans le plan Oxy d’un mouvement de rotation uniforme autour de l’axe Oz (perpendi-
culaire à ce plan) à la vitesse angulaire ω.
Base de temps
: 10 µs par carreau
Voie 1 : Ÿ mode DC
Ÿ 20 V par carreau
Voie 2 (entre les deux curseurs figurant en pointillés) :
Ÿ mode AC
Ÿ 0,1V par carreau
–
0 CH2
–
0 CH1
figure 3

Spé ψ 2005-2006 page 3/6 Devoir n°6
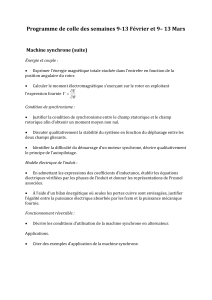
Le mouvement s’effectue dans une partie de l’espace où rè-
gne un champ magnétique
r
B
supposé uniforme d’amplitude BT
qui, lui, tourne dans le plan Oxy autour de l’axe Oz à la vitesse
angulaire ω0 (ω0 n’étant pas a priori égale à ω).
On note
r
u
Z le vecteur unitaire de l’axe Oz et θ0 la valeur
initiale de l’angle (
r
M
,
r
B
).
a) Exprimer θ(t). En déduire la valeur instantanée du
couple
r
r
Γ Γ( ) ( )t t u=
Z
exercé par le champ
r
B
sur le rotor.
b) Pourquoi le moteur synchrone ne peut-il fonc-
tionner que pour une vitesse angulaire ω égale à ω0 ?
II-2) On se place dans le cas ω = ω0.
a) Exprimer la valeur Γ0 de Γ(t).
b) Quelle condition l’angle θ = (
r
M
,
r
B
) entre
r
M
et
r
B
en régime permanent doit-il véri-
fier pour que cette machine fonctionne effectivement en moteur ?
c) Quelle est, dans ce cas (fonctionnement en moteur), la puissance mécanique PMECA
fournie par le moteur ?
d) On suppose que la machine, fonctionnant en moteur, entraîne une « charge » qui im-
pose au moteur un couple résistant de module constant ΓR (les autres couples résistants étant négligés).
Quelle condition doit vérifier ΓR pour que le moteur puisse effectivement entraîner la charge ?
II-3) L’alimentation du moteur comporte un transformateur. Des essais sur un transformateur
identique ont donné :
Essai en CONTINU Essai à VIDE Essai en Court Circuit
Au primaire: U1V = 230V I2CC = 9,1 A
U = 6,0V et I = 1,0A IlV = 0,11 A UlCC = 20 V
U2V = 25,3 V
PlV = 6,9 W PlCC = 11 W
Les tensions et intensités indiquées sont des valeurs efficaces.
En supposant le circuit magnétique linéaire, le modèle équivalent du transformateur est le sui-
vant.
a) Déterminer numériquement la résistance R1 et le rapport de transformation m.
b) Donner le modèle équivalent du transformateur vu du secondaire, en faisant apparaî-
tre une résistance RS et une inductance LS.
c) À l'aide des résultats de l'essai à vide, déterminer numériquement :
α) les pertes par effet joule à vide PJV ;
β) les pertes dans le fer PFV;
γ) le facteur de puissance à vide cos(ϕV). Commenter.
d) À l'aide des résultats de l'essai en court circuit, déterminer numériquement:
α) la résistance R2.
r
u
Z ¤
θ
(t)
θ
0
r
B
(t)
r
B
(t = 0)
r
M
(t = 0)
r
M
(t)
m
u1 u2
Ÿ
Ÿ
R
2
L
2
R
1
L
1
u1 u2
Ÿ
Ÿ

Spé ψ 2005-2006 page 4/6 Devoir n°6
β) L’inductance des enroulements ramenée au secondaire LS.
Partie III
ÉTUDE D’UN MOTEUR PAS A PAS
III-1) Une bobine b parcourue par un courant i crée un champ magnétique
r
B
EXT , proportionnel au
courant i:
r
B
EXT = K.i.
r
u
X . Un barreau de fer doux de volume V est en rotation libre d’angle θ autour de
l’axe Oz dans la région où règne le champ
r
B
EXT . Le fer doux est un matériau ferromagnétique: ainsi dans le
barreau règne un champ magnétique
r
B
INT = BINT
r
u
, une excitation magnétique
r
H
= H
r
u
et une aimantation
r
r
M M u
a
a
=, où
r
u
est le vecteur unitaire de l’axe du barreau. (
r
B
INT,
r
H
et
r
M
a
sont supposés uniformes dans
le volume du barreau).
a) Représenter l’allure de Ma en fonction de H. Quelles sont les
unités de ces deux grandeurs ?
b) Le barreau est utilisé dans le domaine linéaire ferromagné-
tique. Sa perméabilité magnétique relative µr est de l’ordre de 2000. Montrer
alors que
r
B
INT = µ0
r
M
a
.
c) L’intense ferromagnétisme du barreau canalise les lignes de
champ parallèlement à son axe
r
u
. Dans ces conditions:
r
B
INT = (
r
B
EXT.
r
u
)
r
u
si | |θ
π
≤
4
;
r
B
INT =
r
0
si | |θ
π
>
4
.
L’expression du moment magnétique
r
M
du barreau s’écrit:
r
M
= A.i.cos(θ)
r
u
si | |θ
π
≤
4
;
r
M
=
r
0
si | |θ
π
>
4
.
Exprimer A en fonction de µ0, V et K.
d-α) Exprimer le couple exercé par le champ magnétique
r
B
EXT sur le barreau.
β) Déterminer les positions d’équilibre du barreau. Étudier leur stabilité.
III-2) Réalisation d’un moteur pas à pas unipolaire.
Description du moteur:
Le rotor est constitué de deux barreaux de fer doux or-
thogonaux analogues à celui qui a été étudié au I). Sa rotation
autour de Oz est repéré par l’angle θ. Les résultats du I) restent
valables pour chaque barreau.
Le stator est constitué de trois bobines b1, b2 et b3 ana-
logues à la bobine b du 1) dont les axes font entre eux des angles
de
2
3
π
. Chaque bobine est parcourue successivement par un
courant continu i0 grâce à un circuit de commutation qui sera
étudié au III). a) On définit l’état 1 par i1 = i0, i2 = 0, i3 = 0 que
l’on pourra nommer (1,0,0). Déterminer les positions d’équilibre du rotor dans cet état. On choisit de dire
qu’une de ces positions correspond à θ = 0.
b) On passe de l’état 1 (θ = 0) à l’état 2 (θ = θ2) par i1 = 0, i2 = i0, i3 = 0 . C’est l’état
(0, 1, 0). Déterminer la nouvelle position θ2 du rotor dans cet état .

Spé ψ 2005-2006 page 5/6 Devoir n°6
c) En le reproduisant sur la copie, compléter le tableau de commutation suivant permettant
de faire tourner le rotor d’un demi-tour. On introduira le nombre convenable de colonnes.
θ0
i11 0
i20 1
i30 0
d) Combien de positions différentes le rotor peut-il occuper entre 0 et 2π ?
e) À partir de θ = 0, on souhaite faire tourner le rotor de 60° dans le sens négatif. Définir,
sous forme de tableau, la séquence de commutation à utiliser.
f) Ce moteur pas à pas peut être utilisé pour entraîner indirectement l’aiguille des secondes
d’une grande horloge de gare. On souhaite que l’aiguille s’arrête sur chaque seconde.
α) Quel dispositif mécanique faut-il placer sur l’axe du rotor ?
β) Quelle doit être la période de commutation T (intervalle de temps entre deux états
successifs définis à la question 2)) ?
γ) Déterminer la valeur maximale CR,MAX du couple résistant CR sur l’axe du rotor
(par exemple le couple exercé par le poids de l’aiguille) pour que l’horloge ne saute pas de secondes.
III-3) Commutation du moteur pas à pas.
Données:
Les bobines bi sont identiques et équivalentes chacune à une résistance r = 10 Ω et une inductance
L = 100 mH en série.
R1 = 400 Ω ; I0 = 1,0 A (source continue de courant) ; E = 24 V (source continue de tension) Les
diodes D0, D1, D2 et D3 sont idéales.
Les transistors T1, T2 et T3 sont utilisés en commutation et commandés par la grandeur gi:
Ÿ si gi = g0 le transistor Ti est équivalent à un interrupteur idéal fermé ;
Ÿ si gi = 0 le transistor Ti est équivalent à un interrupteur idéal ouvert.
Schéma du montage
I0
i1
D1
T1
g1
R1
r
b1
i2
D2
T2
g2
R1
r
b2
i3
D3
T3
g3
R1
r
b3
D0 E
B
C
1
A
+
L
L
L
 6
6
1
/
6
100%