GPA-783 Acquisition de données et identification du procédé à

DÉPARTEMENT DE GÉNIE DE LA PRODUCTION AUTOMATISÉE
GPA-783
ASSERVISSEMENT NUMERIQUE EN TEMPS REEL
MANIPULATION #1
Acquisition de données et identification du procédé à commander
par
PASCAL BIGRAS
RÉDIGÉ: Août 1999
REVISÉ: Hiver 2010

2
Introduction
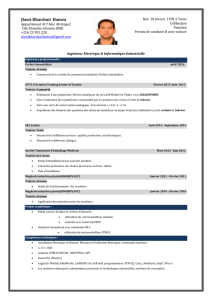
Le procédé qui sera commandé durant les laboratoires du cours d’asservissement
numérique en temps réel est le vérin électrique illustré par la Figure 1. Le mouvement de
la partie mobile de ce vérin est actionné par un moteur à courant continu qui est alimenté
par un amplificateur de puissance dont la tension d’entrée peut varier entre –10 et +10
volts. Comme l’indique la Figure 1, la position de la partie mobile du vérin est mesurée
par un encodeur incrémental.
La Figure 2 montre l’environnement de travail du laboratoire. Elle indique entre autre
que les entrées-sorties du procédé à commander (vérin) sont connectées à une carte
d’acquisition qui est insérée à l’intérieur d’un ordinateur fonctionnant sous le système
d’exploitation Windows. En effet, l’entrée de l’amplificateur de puissance est branchée
au premier convertisseur numérique à analogique (N/A) de la carte d’acquisition tandis
que l’encodeur incrémental est branché au décodeur de position de cette même carte. Ces
signaux d’entrées-sorties sont accessibles par l’entremise du logiciel LABVIEW. Dans
les manipulations qui suivront, ce logiciel sera utilisé pour programmer en temps réel,
dans un langage graphique propre à LABVIEW, les systèmes de commande étudiés dans
le cours.
Description générale de la programmation dans LABVIEW
Le logiciel LABVIEW est utilisé pour commander le vérin électrique en temps réel par
l’entremise de la carte d’acquisition. La programmation de LABVIEW est réalisée grâce
à un langage graphique de haut niveau. Pour faciliter la compréhension et éviter les
piétinements inutiles, un programme de base permettant de lier les entrées-sorties du
procédé à un environnement en temps réel dans LABVIEW vous ai fournis. Ce
programme, illustré par la Figure 3, permet d’envoyer une tension à l’entrée de
l’amplificateur, d’échantillonner la position et de calculer la vitesse pour un nombre
d’échantillons et une période d’échantillonnage choisis. En plus de la fenêtre de
programmation, LABVIEW fait toujours intervenir une fenêtre de contrôle. Cette fenêtre,
illustrée par la Figure 4, permet non seulement de moduler certaines variables du
programme au cours de son exécution, mais également d’en visualiser d’autres à l’aide
d’outils de visualisation tels que des graphiques. Dans la fenêtre de contrôle de la Figure
4, un contrôle de type valeur numérique permet de moduler la tension envoyée au
procédé tendis que les trois graphiques illustrent l’évolution de la position, de la vitesse
et de la commande.

3
Amplificateur
de puissance
Encodeur incrémental
(mesure de position)
Moteur à courant
continu
Piston
(partie mobile)
Réducteur
de vitesse
Interrupteurs
de fin de course
Cylindre
Alimentation
primaire
Connecteur
Interrupteur
de positionnement
manuel
Figure 1: Vérin électrique
Dans la fenêtre de programmation de la Figure 3, on distingue un rectangle qui englobe
toute la partie du programme qui doit être exécutée à chaque période d’échantillonnage.
Ce rectangle représente une boucle de programmation de type « for ». En fait, deux de
ces boucles sont imbriquées. La boucle interne est synchronisée sur une horloge de 1
milliseconde qui est représentée par l’icône métronome. Comme on peut le constater sur
la Figure 3, il est très facile de modifier la période d’échantillonnage et le nombre de
période d’échantillonnage de l’exécution.

4
Amplificateur de puissance
Cylindre
Alimentation primaire
Connecteur
Ordinateur
Carte
d'acquisition
Figure 2 : Environnement du laboratoire de commande par ordinateur.

5
Figure 3 : Fenêtre de programmation dans LABVIEW
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%