T - INSA Toulouse

Introduction aux hacheurs,
approche fonctionnelle
Introduction
En guise d'introduction, nous allons prendre un exemple simple, ce sera le fil rouge du document :
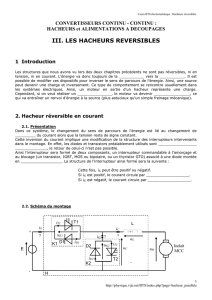
« On veut faire varier la vitesse d'un moteur à courant continu. »
Une solution d'électronicien incompétent en matière d'électronique de puissance … :
L'électronicien qui ignore les techniques de découpage va inévitablement penser au fameux « pont
diviseur » :
On agira alors sur la résistance R pour diminuer la tension UM. Prenons un exemple :
UBatt = 24V,
UM = 12V,
IM = 1A.
La résistance vaudra donc 12. La puissance qu'elle dissipe sera de 12W, autant que celle du
moteur ! Le rendement est donc ici de 50%...
Commentaires :
•Si on veut piloter un moteur de 5MW (TGV par exemple), on comprend bien que ce
fonctionnement est inacceptable. Et même pour des puissances bien inférieures, un tel
rendement est à proscrire absolument.
•Ce modèle de la résistance variable est utilisé dans les structures suivantes (même si la
T.Rocacher 1/13
R réglable
UM
IM
UBatt
Figure 1 : variation de tension par « pont diviseur »,
exemple de régulation de tension pour un moteur

résistance en question n'apparaît pas directement) :
•les amplificateurs avec étage push-pull classe A, B, AB, ou C (les transistors du
dernier étage font office de résistance)
•les régulateurs linéaires de tension (type 7805). Là encore un transistor dit
« ballast » fait office de résistance ajustable => les régulateurs linéaires
chauffent
L'utilisation de plus en plus massive des convertisseurs DC/DC dont le hacheur est l'élément
fondamental tient donc à la nécessité de construire des variateurs de tension à haut rendement.
Cadre général d'étude :
–les interrupteurs constitutifs des hacheurs étudiés seront idéaux (impédance nulle à l'état on,
infini à l'état off, courant circulant dans n'importe quel sens)
–La charge sera très inductive : elle contient une inductance très grande, de sorte que le
courant y circulant évolue TRES LENTEMENT, quasi continu.
Le document se décompose en plusieurs chapitres qui doivent être lus dans l'ordre :
Chapitre 1 : Analyse d'un hacheur à deux interrupteurs
On verra le principe de base du découpage, la forme de la tension de sortie, le rendement, les
limitations dans l'utilisation.
Chapitre 2 : Analyse d'un hacheur à quatre interrupteurs
Qu'est ce qu'apporte cette configuration par rapport à la configuration à 2 interrupteurs ? Quelle est
la forme d'onde en sortie de ce hacheur ?
Chapitre 3 : Les quadrants de fonctionnement du hacheur
Chapitre 4 : Résumé, ce qu'il faut retenir sur l'analyse aux valeurs moyennes
T.Rocacher 2/13

1. Analyse d'un hacheur à deux interrupteurs
1.1. La structure du hacheur à deux interrupteurs
L'idée fondamentale derrière la conversion DC/DC repose sur l'utilisation d'interrupteurs (Diode,
transistors, IGBT...) qui vont être commutés à haute fréquence (> 20kHz). Pourquoi ?
Une première réponse ultra simple mais qui pourtant éclaire assez bien l'approche : parce qu'on se
dit que plutôt qu'utiliser une résistance variable en continu (qui dissipe de la puissance), on préfère
utiliser un interrupteur rapidement commuté on/off en agissant sur le rapport cyclique. De cette
manière on espère aboutir au même effet que la résistance sans dissiper de puissance. Que
l'interrupteur soit on ou off, il dissipe 0W puisqu'on le considère parfait. On aurait donc réalisé un
variateur de tension à 100% de rendement.
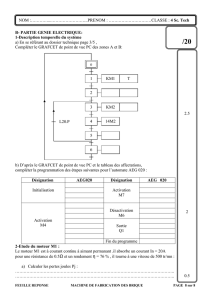
Dès lors on aboutit à la structure encore incomplète suivante :
Si ce schéma est correct pour une charge résistive, malheureusement, il devient inutilisable pour une
charge inductive comme un moteur. Elle ne tolère pas les ruptures de courant imposées par
l'interrupteur :
ESelf =1
2.L. I 2[J]
, annuler I revient à annuler l'énergie emmagasinée dans l'inductance de
manière instantané, et P devient alors infini (
P=dE
dt [W]
, [2]).
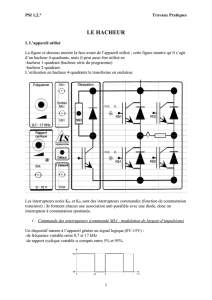
Pour palier ce problème, il suffit d'introduire un second interrupteur qui donne un chemin au
courant appelé par la charge. On le place entre la référence de tension et la sortie du premier
interrupteur. Il est piloté en opposition de phase par rapport au premier interrupteur : on obtient la
brique de base de tout convertisseur, la cellule de commutation.
T.Rocacher 3/13
R réglable
UM
IM
UBatt
Figure 2 : première idée d'un circuit à découpage
UM
IM
UBatt
Figure 3 : cellule de commutation ,la brique de base d'un
convertisseur DC/DC
Cmde 1
Cmde 1

Ce schéma est souvent représenté verticalement. On parle alors d'un bras de commutation. Par
ailleurs, les deux commandes complémentaires sont élaborées par un organe de commande. Elle a
pour rôle de :
–proposer une entrée 0/3V3 compatible avec un uC comme le STM32
–opposer les deux commandes de manière à ce qu'il n'y ait JAMAIS de court-circuit de la
source de tension E (gestion des temps morts)
–fournir une énergie considérable pour commuter efficacement chaque interrupteur
–adapter la commande du premier interrupteur dont aucune de ses bornes n'est reliée à la
référence de tension.
Ce circuit est appelé Driver de MOS. Il est INDISPENSABLE.
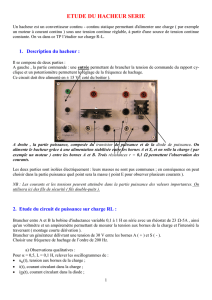
Le signal de commande du dispositif est donc une PWM à fréquence élevée. Son rapport cyclique
va fixer celui de la tension UM, comme le montre la figure 5.
T.Rocacher 4/13
Figure 4 : bras de commutation complet avec Driver de MOS
Cmde
PWM
t
Cmde 1 (état K1)
t
Cmde 2 (état K2)
t
UM
t
On Off On Off On Off On
Off On Off On Off On Off
3,3V
24V
Figure 5 : chronogrammes du hacheur à deux interrupteurs
T
T est la période de la PWM
UM
IM
UBatt
Cmde
PWM
0/3V3 Cmde 1
Cmde 2
Driver MOS
K1
K2

1.2. Tension et courant dans la charge, le moteur
On rappelle le cadre de cette étude : le courant circulant dans la charge évolue TRES
LENTEMENT.
Afin de bien comprendre le phénomène en jeu, nous allons supposer que le moteur a le modèle
électrique suivant [1]:
Le hacheur se comporte comme une véritable source de tension
délivrant des créneaux de rapport cyclique variable.
Il impose donc la tension à l'induit du moteur.
Pour ce qui est du courant, c'est le profil couple – vitesse de la
charge mécanique du moteur, =f() , qui l'impose. Ce courant
IM peut être positif ou négatif. Il n'a rien à voir avec UM.
A titre d'exemple, on va considérer le courant négatif. Le cas se produit typiquement pour un engin
équipé d'une MCC qui descend une pente (il y a survitesse et freinage par récupération d'énergie).
Prenons des valeurs pour l'ensemble des éléments :
Ubatt = 24V
= 1/3
R = 0.1
L=10H (volontairement immense pour rendre le courant constant)
I= - 10A
On peut donc écrire la loi des mailles en instantané :
UM(t)=R.I M(t)+Ldi
dt +E(t)=R.I M(t)+UL(t)+E(t)
(1) , UL étant la tension aux bornes de
l'inductance.
Cette expression peut être intégrée sur une période de découpage :
1
T∫TUM(t)= 1
T∫TR.I M(t)+ 1
T∫TUL(t)+ 1
T∫TE(t)
Etant donné que L est énorme, IM est donc constant sur T. De plus E(t) ne peut pas bouger en si peu
de temps (inertie de l'induit) il est donc lui aussi constant. Nous obtenons :
1
T∫TUM(t)=UM0=α.UBatt=R.I M+E
(2)
→ la valeur moyenne de UM(t), UM0, s'établit donc aux bornes de R et E. C'est la self qui voit à
ses bornes la partie variable de UM(t) comme nous allons le voir.
T.Rocacher 5/13
UM
IM
UM
IM
R
L
E
Figure 6 : Modèle de la MCC
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%