CH 4. Introduction aux Microprocesseurs


Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
Plan du cours
CH 1. Codage de l’Information
CH 2. Les Portes Logiques
CH 3. Les Registres, les mémoires et les ALU
CH 4. Introduction aux Microprocesseurs
CH 5. Le Microprocesseur 8086 d’Intel
CH 6. Le Microcontrôleur PIC16F84 de Microchip
CH 7. Introduction à la Programmation en Langage de Haut Niveau
2

Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
Plan du cours
CH 1. Codage de l’Information
CH 2. Les Portes Logiques
CH 3. Les Registres, les mémoires et les ALU
CH 4. Introduction aux Microprocesseurs
CH 5. Le Microprocesseur 8086 d’Intel
CH 6. Le Microcontrôleur PIC16F84 de Microchip
CH 7. Introduction à la Programmation en Langage de Haut Niveau
3

Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
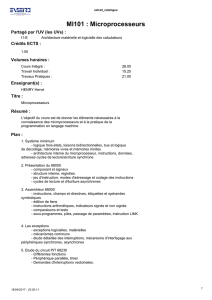
oVers la fin des années 30, Claude Shannon démontra qu'à l'aide de contacteurs il était
possible d'effectuer des opérations logiques en associant le nombre 1 pour « vrai » et
0 pour « faux ».
oCe codage de l'information est nommé base binaire.
oL'homme calcule depuis 2000 ans avant Jésus-Christ avec 10 chiffres (0, 1, 2, 3, 4, 5, 6,
7, 8, 9), on parle alors de base décimale (ou base 10).
oToutefois dans des civilisations plus anciennes ou pour certaines applications actuelles
d'autres bases de calcul ont et sont toujours utilisées :
•base sexagésimale (60), utilisée par les Sumériens ;
•base vicésimale (20), utilisée par les Mayas ;
•base duodécimale (12), les anglo-saxons dans le système d’heure ;
•base quinaire (5), utilisée par les Mayas ;
•base binaire (2), utilisée par l'ensemble des technologies numériques
CH 1. Codage de l’Information
Histoire des systèmes de numération
4

Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
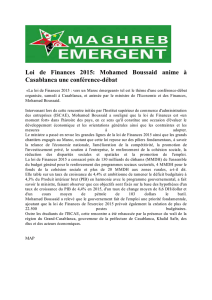
CH 1. Codage de l’Information
•Le terme bit signifie « Binary Digit », c'est-à-dire 0 ou 1 ;
•Un bit : deux états sont possibles : soit 1, soit 0 ;
•Deux bits : 4 états possibles : 00, 01, 10 et 11
Bit
Dans un nombre binaire, la valeur d'un bit, appelée poids, dépend de la position
du bit en partant de la droite.
Poids des bits
Nombre binaire
1 1 1 1 1 1 1 1
Poids
27=128
26=64
25=32
24=16
23=8
22=4
21=2
20=1
L'octet (byte) est une unité d'information composée de 8 bits.
Il permet de stocker un caractère, tel qu'une lettre ou un chiffre.
Le plus petit nombre est représenté par : 00000000 = 0
Le plus grand nombre est représenté par : 11111111 = 255
Octet
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
1
/
155
100%