Télécharger

ECOLE DE TECHNOLOGIE SUPÉRIEURE
UNIVERSITÉ DU QUÉBEC
THESE PRESENTEE A
L'ÉCOLE DE TECHNOLOGIE SUPÉRIEURE
COMME EXIGENCE PARTIELLE
À L'OBTENTION DU
DOCTORAT EN GÉNIE
Ph.D.
PAR
BELHADJ YOUSSEF. Nesrine
MODELISATION ET COMMANDE DES REDRESSEURS TRIPHASES
FONCTIONNANT À HAUT RENDEMENT ET À FAIBLE TAUX DE DISTORSION
HARMONIQUE: APPLICATION AU REDRESSEUR TRIPHASÉ DE VIENNE
MONTRÉAL. LE
18
DECEMBRE 2007
© Nesrine
BeJhadJ
youssef.
2007

CETTE THESE A ETE EVALUEE
PAR UN JURY COMPOSÉ DE:
M.
Kamal
Al-Haddad,
directeur de thèse
Département de génie électrique à l'École de Technologie Supérieure
M. Hadi-Y. Kanaan, codirecteur de thèse
Département Electricité et Mécanique à l'Ecole Supérieure d'Ingénieurs de Beyrouth
(ESIB),
Liban
M. Éric David, président du jury
Département de génie mécanique à l'École de Technologie Supérieure
M. Louis-A. Dessaint, membre du jury
Département de génie électrique à l'École de Technologie Supérieure
M. Géza Joos, membre du jury
Département de génie électrique et informatique à l'Université de
Me Gill
M. Gérard-A. Capolino, examinateur externe
Département de génie électrique à l'Université de Picardie Jules Verne, France
M. Vijay Sood, examinateur externe
Département de génie électrique et d'informadque à l'Université de Concordia
ELLE A
FAIT
L'OBJET D'UNE SOUTENANCE DEVANT JURY ET PUBLIC
LE 14 DÉCEMBRE 2007
À L'ÉCOLE DE TECHNOLOGIE SUPÉRIEURE

REMERCIEMENTS
Je voudrais exprimer mes remerciements les plus sincères à
Prof.
Kamal Al-Haddad,
mon directeur de thèse, pour ses directives fort intéressantes et son soutien considérable,
qu'il soit scientifique ou moral. Je tiens également à saluer son grand
professionnaUsme
d'encadrement, ainsi que son talent à gérer les divergences d'opinions.
Mon deuxième remerciement s'adresse à Dr. Hadi Y. Kanaan, mon co-directeur de thèse,
qui n'a épargné ni temps ni effort malgré les distances, pour me faire part de sa large
expérience et de son grand savoir en recherche.
Je remercie également le président et les membres de Jury pour
m'avoir
fait l'immense
privilège d'évaluer équitablement mon travail. Je salue également les efforts respectables
qu'ils déploient dans leurs missions d'enseignement et de recherche.
Je tiens également à remercier la Chaire de Recherche du Canada en Conversion de
l'Énergie Électrique et en Électronique de Puissance pour leur soutien financier, qui m'a
fourni, ainsi qu'aux autres membres du groupe, tous les moyens logistiques et matériels
nécessaires au parfait avancement de nos projets.
Par la même occasion, je voudrais remercier tous les techniciens du département génie
électrique, plus particulièrement M. Yves Robitaille, Mme Johanne Roy, M. Rigoberto
Avelar, Mme
Edith
Deslandes et M. Jorge Rojas Abad, pour m'avoir facilité l'acquisition de
matériel nécessaire à mes expérimentadons, ainsi que pour leurs conseils techniques fort
pertinents.
Finalement, je voudrais dédier cette thèse aux êtres qui me sont les plus chers au monde, les
membres de ma famille, et plus spécialement à mes parents qui m'ont accordé la plus
grande confiance, dont j'espère être et rester à la hauteur. J'aimerais leur dire que leurs
encouragements, au cours de mes années de thèse et tout au long de mon cursus

IV
universitaire, ont été pour moi
la
meilleure motivadon pour surpasser les difficultés qui
m'ont rencontrée et tenir à mes ambitions.

MODÉLISATION E T COMMANDE DE S REDRESSEURS TRIPHASÉ S
FONCTIONNANT À HAUT RENDEMENT E T À FAIBLE TAUX D E DISTORSION
HARMONIQUE: APPLICATION A U REDRESSEUR TRIPHAS É D E VIENNE
BELHADJ YOUSSEF, Nesrine
RÉSUMÉ
Les problèmes de la qualité de fonde électrique constituent l'une des préoccupations
majeures des fournisseurs de l'énergie et des organismes spécialisés en qualité d'énergie. Ce
sujet a gagné davantage d'ampleur avec l'utilisation ascendante des convertisseurs de
l'énergie électrique dans la majorité des applications industrielles et domestiques. Dans
le
cadre de cette thèse, on s'intéresse plus particulièrement au type des convertisseurs
continu/alternatif
dont le fonctionnement adéquat implique la parfaite régulation du bus DC
de tension, l'atténuation des harmoniques de courants, la compensation de l'énergie réactive
et la maximisation du rendement énergétique. Ces différents critères doivent être maintenus
pour diverses conditions de fonctionnement, c'est-à-dire indépendamment des variations
paramétriques auxquelles le système peut être sujet.
11
s'avère donc indispensable d'adopter
des techniques de commande efficaces, ce qui passe par une modélisation correcte du
convertisseur.
On se propose, en un premier temps, de mettre en place une plate-forme expérimentale pour
la validation des différents concepts théoriques proposés. Pour ce faire, on a conçu et mis en
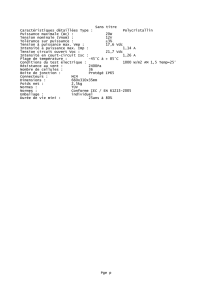
œuvre un redresseur triphasé non polluant de 1.5 kVA, alimentant des charges purement
résistives. Une étude comparative de différentes topologies non polluantes nous a incité à
choisir le redresseur triphasé trois-nivaux à trois interrupteurs, communément connu sous le
nom "convertisseur de Vienne". Le choix de cette topologie a été motivé par ses avantages
point de vue simplicité de circuiterie, rendement énergétique élevé et très hautes
performances pour la correction de facteur de puissance. L'approche de design proposée dans
ce travail est générale, et peut être facilement adaptée à des prototypes de plus grande
puissance.
La deuxième étape consiste à caractériser le plus précisément possible les dynamiques du
convertisseur. La technique de la moyenne sur une période de commutation est alors utilisée
pour développer le modèle d'état moyen du convertisseur. Le modèle ainsi obtenu présente
de très fortes variances dans le temps, le rendant difficiles à
exploiter
pour des fins de
commande. Une transformation adéquate des rapports cycliques, ainsi que l'expression des
variables d'état instantanées dans le repère synchrone dqo, permettent de résoudre cet
inconvénient. Par la suite, le modèle moyen obtenu est utilisé pour dériver le modèle statique
(au point de
foncfionnement
nominal) et le modèle en régime de
pefits
signaux. Ces
différents modèles du convertisseur sont validés en temps réel sur le prototype expérimental,
moyennant la carte de commande
DSI
104 de dSPACE® et l'environnement
Real-Time
Workshop de Matlab. Les
oufils
de validation du modèle moyen sont basés sur l'analyse des
trajectoires dans le plan de phase et des réponses temporelles. Pour le modèle fréquentiel, on
utilise la fameuse technique de perturbation en petits signaux et les diagrammes de Bode.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
1
/
360
100%