Données techn., schémas de raccordement, dimensions

Fiche technique NVKC24A-MP-RE
Servomoteur linéaire communicant
avec fonction de sécurité pour vannes
à siège 2 et 3 voies
• Forcede1000N
• AlimentationélectriqueAC/DC24V
• Commandeproportionelle0,5…10V
DCparamétrable
• Coursenominale20mm
•Temps de course 35s / 20mm
•Conversion signal sonde
• SystèmeSuperCapconçupour15
ans
•Communication MP-Bus
Caractéristiquestechniques
Donnéesélectriques Tension nominale AC/DC 24 V
Fréquence 50/60 Hz
Plage de fonctionnement AC 19.2...28.8 V / DC 21.6...28.8 V
Puissance consommée en fonctionnement 4.5 W
Puissance consommée à l'arrêt 1.5 W
Dimensionnement pour les câbles 9 VA
Raccordement Borniers 4 mm²
Raccordement parallèle Oui
Valeurs fonctionnelles Force de positionnement 1000 N
Signal de commande Y DC 0...10 V
Info. sur le signal Y Résistance d'entrée 100 kΩ
Plage de travail Y DC 0.5...10 V
Plage de travail Y réglable Début DC 0.5 ... 30V
Fin DC 2.5 ... 32V
Signal de recopie U DC 0.5...10 V
Info. sur le signal U max. 0.5 mA
Signal de recopie U recopie Début DC 0.5 ... 8V
Fin DC 2.5 ... 10V
Réglage de la position de sécurité Rotation du servomoteur sur 0...100% réglable
(bouton rotatif "POP")
Réglage du temps avant la mise en sécurité ("PF") 1...10 s
Synchronisme 5% valeur absolue
Commande manuelle Débrayage du servomoteur par bouton poussoir
Course nominale 20 mm
Temps de manoeuvre 35 s / 20 mm
Temps de course pour la fonction de
sécurité
35 s / 20 mm
Commande forcée MAX (position max.) 100 %
Commande forcée MIN (position min.) 0 %
Commande forcée ZS
(position intermédiaire, uniquement AC)
50 %
Réglage de la commande forcée ZS ZS = MIN ... MAX
Niveau de puissance sonore max. 60 dB (A)
Information sur le niveau sonore du moteur 60 dB (A) avec temps de course de 90 s
Niveau sonore max. de la fonction de
sécurité
60 dB (A)
Indication de la position Mécanique, sur la course de 5 ... 20 mm
Sécurité Classe de protection IEC/EN III Isolation de protection
Indice de protection IEC/EN IP54
CEM CE selon 2004/108/EC
Certification IEC/EN Certifié: IEC/EN 60730-1 et IEC/EN 60730-2-14
Fonctionnement Type 1.AA
Tension de courant nominal 0.8 kV
Degré de pollution de l'environnement 3
Température ambiante 0°C ... 50°C
Température de stockage -40°C ... 80°C
Humidité ambiante 95% r.h., sans condensation
Entretien Sans entretien
Poids Poids 2.800 kg
www.belimo.fr NVKC24A-MP-RE_FR_10-2016_Sous réserve de modifications 1

!
• Le servomoteur est conçu pour une application dans les installations de chauffage,
de ventilation et de climatisation stationnaires et ne doit pas être employé pour les
applications étrangères au domaine d'utilisation spécifié, tout particulièrement pas
dans les avions et autres moyens de transport aérien.
• Le montage doit être effectué par des personnes ayant été formées à cet effet.
Toutes réglementations officielles ou réglementations émanant d’une autorité
reconnue doivent être observées durant l’installation.
• Le commutateur de modification du sens de rotation ne doit être réglé que
par des personnes agréées. La sens de la direction est une donnée capitale,
particulièrement pour les applications de protection anti-gel.
• L'appareil ne doit être ouvert que dans les ateliers du fabricant. Il ne contient aucune
pièce pouvant être remplacée ou réparée par l'utilisateur
• L’équipement contient des composants électriques et électroniques qui ne doivent
pas être jetés aux ordures ménagères. La législation en vigueur dans le pays
concernée doit absolument être respectée.
Caractéristiquesduproduit
Fonctionnement Le servomoteur est actionné par un signal de commande DC 0 ... 10 V et se
positionne proportionnellement à la valeur de ce signal; En même temps les
condensateurs internes sont également mis en charge.
L'interruption de l'alimentation provoque le retour à la position d'origine (sécurité) par
la décharge des condensateurs et de l'énergie stockée.
Temps de préchargement ("Start Up") Un temps de préchargement est requis pour les condensateurs. Ce temps est utilisé
pour chargé les condensateurs internes pour qu'ils atteignent une tension utilisable
par le moteur. Ainsi, en cas de rupture de l'alimentation, le servomoteur est assuré de
revenir à sa position de sécurité (POP)
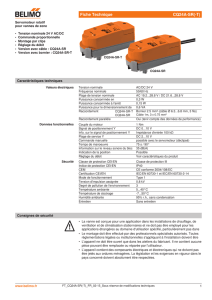
Le temps de préchargement est en grande partie lié :
– à la durée de l'interruption d'alimentation du servomoteur
– au temps d'attente avant le mouvement de sécurité
[d] = Interruption électrique (jours)
[s] = Temps de pré-chargement (secondes)
PF[s] = Temps d'attente avant le mvt de sécurité
Exemple: dans le cas d'une rupture d'alimentation de 3 jours
et avec un temps d'attente avant le mouvement de sécurité
(PF) de 5 s, le servomoteur à besoin d'un charge de 14 s
(voir graphique) avant de pouvoir assurer le mouvement de
sécurité.
Temps de préchargement typiques
0
0
5
10
15
20
25
30
246810 12
0s
5s
2s
10 s
0
5
10
15
20
25
30
[s][d]
0127≥10
05810 15 19
26911 16 20
5811131822
10 12 15 17 22 26
[s]
[d]
[s]
PF
[s]
PF
A la livraison Le servomoteur est complètement déchargé à la livraison d'usine, c'est pourquoi il
a besoin d'environ 20 s pour précharger les condensateurs, avant les réglages et
l'installation.
Servomoteurs avec paramètres
ajustables
Les paramètres usine du servomoteur répondent à la plupart des applications
courantes.
NVKC24A-MP-RE Servomoteurdevanneàsiège,communicant,modulant,
AC/DC24V,1000N, Temps de course 35s / 20mm
Consignesdesécurité
www.belimo.fr
NVKC24A-MP-RE_FR_10-2016_Sous réserve de modifications
2

Montage sur les vannes d'autres
fabricants
Les servomoteurs Retrofit s'installent sur une large gamme de vannes de différents
fabricants et comportent, en plus du bloc moteur, des pièces de montage nécessaires
à l'adaptation. Commencez par la fixation sur l'axe de la vanne pour ensuite serrer la
base de l'adaptation sur la tête de vanne. Ensuite, glissez le servomoteur dans le pied
coulissant et connectez l'ensemble. En prenant en compte la position de fermeture de
la vanne, sécurisez l'ensemble à l'aide des vis et commencez la phase d'initialisation.
Le servomoteur peut tourner sur 360° sur la tête de vanne, si elle le permet.
Montage sur vannes Belimo Pour le montage sur vannes Belimo, merci d'utiliser les servomoteurs standards. Il est
toutefois techniquement possible d'utiliser un modèle Retrofit sur une vanne Belimo.
Commandemanuelle Commande manuelle possible avec bouton poussoir - temporaire ou permanent.
L'engrenage principal reste debrayé lorsque le bouton est maintenu pressé.
La course est ajustable via une clé hexagonale de 4mm, à insérer sur le dessus
du servomoteur. L'axe sort lorsque la clé hexagonale est tournée dans le sens des
aiguilles d'une montre.
Sécurité de fonctionnement élevée Le servomoteur est protégé contre les surcharges, ne requiert pas de contact de fin de
course et s'arrête automatiquement en butée.
Indication de la position La course est indiquée directement sur le kit de montage via la position des
indicateurs. Ils s'ajustent automatiquement durant le fonctionnement.
Position de départ L'axe du servomoteur est placé par défaut en position rétractée.
Sélection de la direction de la course Il est possible de changer le sens de rotation avec le sélecteur en façade du
servomoteur.
Cela n'a aucun impact sur la position de sécurité (POP) qui a été sélectionnée.
Adaptation de la course Lors de la première mise sous tension, le servomoteur réalise une adaptation, ajustant
ainsi la plage de commande et le signal de recopie à la course réelle de la vanne.
Il est possible de lancer une adaptation à tout moment en appuyant sur le bouton
d'adaptation ou avec le PC-Tool.
Le servomoteur se positionne par la suite en fonction de la valeur du signal de
commande.
Bouton rotatif pour la position de
sécurité
PF = Temps d'attente avant mouvement
de sécurité
Il est possible d'ajuster la position de sécurité (POP) entre 0 et 100% (par paliés de
10%) avec l'aide du bouton rotatif.
Le fonctionnement du bouton rotatif à toujours en référence la course réelle
programmée ou réglée.
Dans le cas d'une rupture d'alimentation, le servomoteur bouge immédiatement à la
position de sécurité sélectionnée - prendre en compte le temps d'attente avant la mise
en sécurité (2s)
Les coupures électriques peuvent être compensées durant 10 s maximum.
Durant une coupure électrique, le servomoteur ne bouge pas durant le temps "PF"
défini initialement. Si la coupure électrique dure plus de temps que le temps "PF",
alors le servomoteur bouge et se positionne en position de sécurité définie au
préalable (POP)
Le temps avant le passage en sécurité est fixé d'usine à 2 secondes. Ce temps est
modifiable à l'aide du logiciel PC-Tool.
Réglages : le bouton rotatif ne doit pas être positionné sur "Tool"
Accessoires
Description Type
Accessoires électriques Contacts auxiliaires S2A-H
Outils de paramétrages Boîtier de paramétrage pour servomoteurs MF/MP/Modbus/LonWorks
et gamme VAV-Control
ZTH EU
Logiciel de paramétrage pour réglages et diagnostiques MFT-P
NVKC24A-MP-RE Servomoteurdevanneàsiège,communicant,modulant,
AC/DC24V,1000N, Temps de course 35s / 20mm
Caractéristiquesduproduit
www.belimo.fr NVKC24A-MP-RE_FR_10-2016_Sous réserve de modifications 3

!
Remarques • Raccordement sécurisé par transformateur d'isolement
• Raccordement parallèle possible.
• Réglage standard usine : axe du servomoteur rétracté
Schémas de connexion
AC/DC24V,proportionnel Mode de commande MP-Bus
Y
U
1 32 5
DC 2
...
10 V
DC (0)
2
...
10 V
–
T
~
+
Y
U
1 32 5
– +
T
~
Sensor
MP
Fonctions
Fonctionnementspossiblessansparamétrages
Commandeforcéeaveccontactrelais Commandeforcéeavecswitchmulti-positions
a
1235
b
U
Y
c
~T
Y (DC 0 ... 10 V)
abc
0%
ZS 50%
100%
Y
e.g. 1N 4007
123 5
124
3
U
Y
~T
Pos
1 0%
2ZS 50%
3 100%
4 Y
Y (DC 0 ... 10 V)
e.g. 1N 4007
Commandeàdistance0...100% Fonctionnement maître-esclave
123 5
U
Y
SGA24
SGF24
SGE24
4
YZ
2
13
T
~
~T
+
~
1235 1235
U DC 0.5...10 V
U DC 0.5...10 V
U
YU
Y
–
T
NVKC24A-MP-RE Servomoteurdevanneàsiège,communicant,modulant,
AC/DC24V,1000N, Temps de course 35s / 20mm
Installation électrique
www.belimo.fr
NVKC24A-MP-RE_FR_10-2016_Sous réserve de modifications
4

Commande4-20mAviarésistanceexterne
123 5
U DC 2 ... 10 V
U
Y
(
+
)
(–) 4 ... 20 mA
+
~
–
T
500 Ω
La résistance de 500 Ω
convertie le 4...20 mA en un
signal de commande 2...10 V
Fonctionspossiblesavecparamètresspécifiques.
Commandeforcéeaveccontacts
T
~
abcd
U
T
~
Y
e
5123
abcde
OFF 1)
MIN
ZS
MAX
ON
Y
Y (DC 0 ... 10 V)
e.g. 1N 4007
Commandeforcéeavecswitchmulti-positions
T
~
5123
U
T
~
Y
OFF
1)
MIN
ZS
MAX
ON
Y (DC 0 ... 10 V)
e.g. 1N 4007
1) Attention: Cette fonction
n'est possible qu'avec une
entrée de commande fixée au
minimum à 0.6 V
NVKC24A-MP-RE Servomoteurdevanneàsiège,communicant,modulant,
AC/DC24V,1000N, Temps de course 35s / 20mm
Fonctions
www.belimo.fr NVKC24A-MP-RE_FR_10-2016_Sous réserve de modifications 5
 6
7
8
9
6
7
8
9
1
/
9
100%