Les composants électroniques de commutation

Les composants électroniques de commutation
2ème année
option électronique
année 00/01

Chapitre I : Introduction
Cours de commutation version du 19/01/06 à 13:01 Didier Magnon
Page 2/12
Chapitre I
INTRODUCTION
Sommaire
1 GENERALITES ............................................................................................................... 3
1.1 STRUCTURES DES MONTAGES A COMMUTATION .............................................................. 4
1.1.1 Montage utilisant un interrupteur en commutation ............................................... 4
1.1.2 Montage utilisant une combinaison d'interrupteur................................................ 5
1.1.3 Circuits logiques .................................................................................................... 6
1.2 CARACTERISTIQUES DES INTERRUPTEURS ....................................................................... 6
1.3 SCHEMA EQUIVALENT DES COMPOSANTS ........................................................................ 7
2 CIRCUIT RC SOUMIS A UN CRENEAU.................................................................... 8
2.1 ETUDE D'UN CAS GENERAL .............................................................................................. 9
2.1.1 Calcul de la réponse libre ou de la solution générale de l'ESSM sg(t). ................. 9
2.1.2 Calcul de la réponse forcée ou de la solution particulière de l'EASM sp(t). ....... 10
2.1.3 Détermination de la solution générale de l'équa diff. (1). ................................... 10
2.1.4 Tracé de e(t) et s(t) ............................................................................................... 11
2.1.5 Expression analytique de temps caractéristiques ................................................ 11

Chapitre I : Introduction
Cours de commutation version du 19/01/06 à 13:01 Didier Magnon
Page 3/12
Les composants électroniques de commutation
Chapitre I
INTRODUCTION
1 Généralités
Nous avons à notre disposition de nombreux composants électroniques qui nous permettent de
réaliser une infinité de montages. Ceux ci peuvent être répartis selon deux grandes familles :
- les montages à fonctionnement linéaire,
- les montages à fonctionnement Tout Ou Rien (TOR).
Les montages à fonctionnement linéaire servent en général à transformer de façon continue
des phénomènes physiques en signaux électriques.
Exemples :
* la voix d'un chanteur est captée par un microphone puis, elle est plus ou moins
amplifiée pour être restituée par des enceintes acoustiques.
* Un thermomètre électronique donne en permanence les variations de température.
Dans ce type d'application la sortie est proportionnelle à l'entrée et de façon grossière
elles sont reliées par un gain. L'information est traduite en continu, c'est ce que l'on a
coutume d'appeler l'électronique analogique.
Les montages à fonctionnement TOR utilisent des composants qui ne donnent qu'une
information binaire; vrai ou faux. Ils sont souvent appelés INTERRUPTEURS.
Attention: ce qui ne signifie pas obligatoirement une sortie numérique.
On souhaite que la sortie recopie au mieux l'entrée mais le rapport est constant et peu
important. La meilleure image que l'on puisse trouver bien qu'elle ne soit pas
électronique est le relais. Ici, l'information est discrète, elle est issue de la commutation
d'un ou plusieurs composants (généralement de puissance).

Chapitre I : Introduction
Cours de commutation version du 19/01/06 à 13:01 Didier Magnon
Page 4/12
Exemples :
* électronique de puissance, hacheur, onduleur, redresseur, gradateur (variateur de
lumière),
* électrotechnique, Commande de relais, relais statique,
* électronique faible courant, circuits logiques, détection (démodulation à
échantillonnage).
Certains composants sont plus dédiés à l'un ou l'autre type de montage, mais dans la plupart
des cas, les composants discrets (diode, transistor, …) peuvent être utilisés en fonctionnement
linéaire ou en commutation.
Donc de façon analogue à l'électronique analogique, il est impératif en commutation de
déterminer les caractéristiques de fonctionnement d'un composant utilisé en interrupteur. Ils
est donc nécessaire de faire une étude systématique pour déterminer le dimensionnement d'un
composant et de son radiateur en fonction des empiétements générés par la commutation.
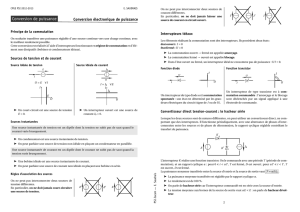
1.1 STRUCTURES DES MONTAGES A COMMUTATION
1.1.1 Montage utilisant un interrupteur en commutation
On met en relation une source (tension ou courant) et une charge à l'aide d'un interrupteur. Le
schéma est alors le suivant :
Figure 1 : Montage à un seul interrupteur
Source
Charge
Interrupteur

Chapitre I : Introduction
Cours de commutation version du 19/01/06 à 13:01 Didier Magnon
Page 5/12
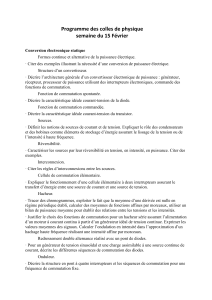
1.1.2 Montage utilisant une combinaison d'interrupteur
On met en relation une source (tension ou courant) et une charge à l'aide d'une combinaison
d'interrupteurs. Le montage le plus connu est le pont en H (dû à sa structure) dont la
représentation est la suivante:
Figure 2 : Structure ou pont en H.
Supposons que la charge soit un moteur à courant continu. Deux fonctionnements sont
possibles.
Soit les interrupteurs forment les couples
Q1, Q4 et Q3,Q2.
Si le couple Q1,Q4 est fermé, Q3,Q2 est
ouvert et la charge voit la tension VE.
Si le couple Q3,Q2 est fermé, Q1,Q4 est
ouvert et la charge voit la tension -VE.
La tension aux bornes de la charge peut
être modulée par ouverture et fermeture
successives de l'un ou des deux
interrupteurs fermés.
Soit les interrupteurs forment les couples
Q1,Q2 et Q3,Q4.
Au repos Q2 et Q4 sont fermés.
Soit on ouvre Q2 et l'on ferme Q1 la
charge voit VE, soit on ouvre Q4 et on
ferme Q3, la charge voit –VE. Mais la
plupart du temps on ferme par impulsions
Q1 (respectivement Q3) et évidemment on
ouvre par impulsions complémentaires Q2
(respectivement Q4), le transistor Q4
(respectivement Q2) reste fermé. Ainsi on
réalise une modulation de 0 à VE
(respectivement de 0 à -VE) au point chaud
de la charge.
Dans tous les cas la charge peut recevoir une tension dont la valeur moyenne est variable et
dont la polarité peut être inversée.
V
E
Charge
Q1
Q2
Q3
Q4
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%