GERBEUR ELECTRIQUE AVEC PLATE-FORME RABATTAB

Dimensions minimales et grande facilité d’utilisation
• Manutentionplusrapide
• Bonnemaniabilité
• Grandeexibilité
système électronique moderne
• Sécuritéd’utilisationégalementenpente
• Respectdesmarchandisesàtransporter
etdel’engin
• Facilitéd’entretien
• Caractéristiquesdeconduiteoptimalesen
permanence,mêmeencasdevariation
desexigences
• Grandesqualitéetduréedevie
• CAN-BUSTechnology
• Grandesqualitéetduréedevie
• Entraînementàmoteurasynchrone
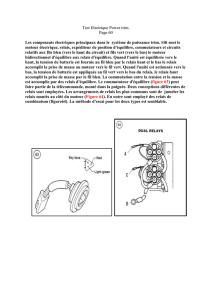
GERBEUR ELECTRIQUE AVEC PLATE-FORME RABATTAB-
LE POUR CONDUCTEUR DEBOUT
La traction laterale ainsi que la roue d’appui montée
sur ressort (4-Punkt-Auflage), garantissent une bonne
stabilité et une excellente traction.
Le bloc moteur et les roues sont intégrés au châssis
et donc protégés contre tout endommagement. Toutes
les roues sont en Vulkollan.
Plate-forme relevée, l’engin peut être utilisé comme un
chariot élévateur à timon habituel. Une vitesse élevée
peut être atteinte, lorsque la plate-forme est abaissée.
Pour éviter de devoir toujours tourner le timon de 90°
en cas de manque de place, le braquage peut, sur
demande, être démultiplié. En outre, une direction
assistée électrique est disponible pour minimiser les
forces de direction.
Commande à microprocesseurs M.O.S. librement pro-
grammable. Sans contacteur du sens de marche.
Le comportement en marche (accéléra-tion, tempori-
sation, vitesse) peut être adapté aux besoins du client.
Malgré l’élévation proportionnelle du mât, on ne né-
cessite pas d’électronique additionnelle.
Les petites dimensions garantissent une grande mani-
abilité, même en cas d’espace réduit.
Largeur engin: 680 mm.
Conception à partir de la gamme complexe ED.
Utilisation multiple de composants tels que entraîne-
ment, commande, mâts, pièce de charge, etc.
Il existe différents modèles de mât, spécialement étu-
diés pour une utilisation à deux niveaux.
Malgré des dimensions réduites toutes les pièces sont
facilement accessibles. Equipement de série:
ARRET D’URGENCE, galets de fourche tandem,
compteur horaire combiné avec un indicateur de dé-
charge de batterie.
Options:
Une conception pour le changement de batterie laté-
rale, également pour les grandes batteries.
STRUCTUREETÉQUIPEMENT
DIMENSIONS
PLATE-FORMEPOURCONDUCTEURDEBOUT
SYSTÈMEÉLECTRONIQUE
ENTRAÎNEMENT
STÖCKLIN–VOSAVANTAGES
EDD 1001-P

EDD 1001-P
CARACTÉRISTIQUES TECHNIQUES
Stöcklin Logistique SA
Technique de convoyage et de stockage
CH-4143 Dornach
Tel. +41 (0) 61 705 81 11
Fax +41 (0) 61 705 84 70
E-Mail [email protected]
www.stoecklin.com
SWISS MADE / ISO 9001
Stöcklin ou son partenaire dans votre région est
à votre disposition pour vous conseiller.
1.2 Type EDD 1001-P
Performances
1.5 Capacité de charge/Charge levage initial Q[kg] 1600
Capacité de charge/Charge levage fourche Q[kg] 1000
1.6 Distance centre de gravité charge c[mm] 600
5.1 Vitesse de déplacement avec/sans charge [km/h] 5,5/6,0
Vitesse de déplacement avec/sans charge* [km/h] 8,0/9,5
5.2 Vitesse de levage avec/sans charge [m/s] 0,1/0,14
5.3 Vitesse d’abaissement avec/sans charge [m/s] 0,45/0,25
5.8 Tenue en côte avec/sans charge [%] 8,0/17
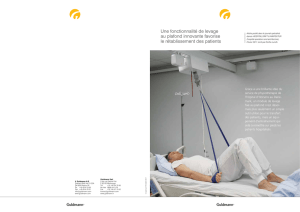
Dimensions
1.8 Distance charge x [mm] 970
1.9 Empattement y [mm] 1545
4.4 Levage initial h3 [mm] 110
4.9 Hauteur min./max. timon en service h1 [mm] 1195/1475
4.15 Fourche abaissée h [mm] 90
4.19 Longueur totale L [mm] 1945/2370*
4.20 Longueur avant-corps * L2 [mm] 795/1220*
4.21 Largeur totale B [mm] 680
4.22 Masse fourche s/e/l [mm] 60/185/1150
4.25 Ecartement ext. fourche B3 [mm] 560
4.32 Distance/sol position abaissée m2 [mm] 30
4.34 Largeur couloir de service palette 800x1200 Ast [mm] 2195/2620*
Distance de sécurité a/2 [mm] 100
4.35 Rayon de braquage Wa [mm] 1790/2215*
H
EDD 1001-P
Poids (mât C21, batterie 280 Ah)
2.1 Poids propre, avec batterie [kg] 910
2.2 Charge par essieu avec charge avant/arrière [kg] 640/1270
2.3 Charge par essieu sans charge avant/arrière [kg] 691/256
Roues
3.1 Pneus de toutes les roues Vulkollan
3.2 Moteur 1x230/70
Type d’entraînement/timon latéral/central
3.3 Roulettes de charge 4x83/70
3.4 Galets supports 1x2x125/50
Entraînement et commande
6.1 Moteur de traction [kW] 1,25
Type de moteur asynchrone (AC)
6.2 Moteur de levage [kW] 2,5
8.1 Commande conduite programmable
Microprocesseur
5.10 Frein de roulement Contre courant
Frein de blocage électro-méca. [NM] 11
Batterie 24 V (2 x 12 V Serie)
6.3 Type de batterie PPV-DIN PPV-DIN
6.4 Tension batterie, capacité [V/Ah] 24/280 (345**)
Type de batterie 2EPzS280 (3EPzS345**)
Modèles de mâts 4.2 4.3 4.4 4.5
Typ
A15 1200 – 1486 1910
A17 1300 – 1686 2110
A19 1400 – 1886 2310
A21 1500 – 2086 2510
A24 1650 – 2386 2810
A26 1750 – 2586 3010
C21 1150 – 2156 2540
* plate-forme abaissée **Longueur L et L2 + 70 mm | Sous réserve de modifications techniques.
Hauteur cons h1 Hauteur libre Hauteur levage H Hauteur totale
de levage h5 déployé h4
1
/
2
100%