ETHERNET SE RAPPROCHE DES BUS DE TERRAIN

MESURES 772 - FÉVRIER 2005 21
Page 22
Standards : Ethernet depuis
ses origines jusqu’aux
normes actuelles
Page 25
Ethernet industriel soulève
beaucoup de questions…
Page 28
L’IEEE 1588, un protocole
pour une synchronisation
précise des équipements
Page 32
Profinet temps réel arrive
Page 35
Ethernet Powerlink,
un standard
déjà bien établi
Page 39
Quelques produits
SOMMAIRE
ETHERNET
SE RAPPROCHE
DES BUS DE TERRAIN
Dans sa longue histoire, Ethernet
est longtemps resté en marge
des applications industrielles.
Les choses sont en train
de fortement changer.
Les fabricants d’instruments de
mesure, de systèmes d’acquisition
de données et d’équipements
d’automatismes s’intéressent
désormais fortement à lui.
Les industries de l’instrumentation et des automatismes ont de tout temps
cherché à profiter des avancées technologiques faites dans d’autres disciplines
(le grand public, la gestion, le militaire, le médical, etc.). Ethernet, par sa diffusion
de masse dans la bureautique, a vite suscité de l’intérêt. Mais cette technologie
n’était pas suffisamment mature. Ces dernières années, avec l’augmentation des
débits (on en est au gigabit/s) et l’avènement des switchs (réseaux commutés), le
monde industriel a reconsidéré Ethernet. Et son lien direct avec Internet a encore
accéléré le mouvement.
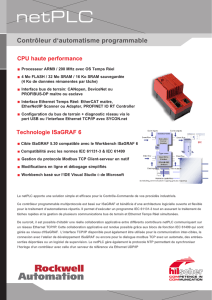
Pratiquement tous les instruments de mesure électronique et les contrôleurs
d’automatismes ont aujourd’hui un port Ethernet. Les composants durcis, mon-
tables sur rail Din, alimentés en 24 V facilitent l’intégration en ambiance indus-
trielle. L’émergence des solutions temps réel, des redondances, de synchronisa-
tion précise des stations connectées va accentuer le mouvement. Il reste encore à
améliorer les aspects temps réel, à diminuer les coûts et régler les problèmes de
sécurité pour faire sauter de nouveaux verrous.
Ethernet Dossier
Bystronic
Dossier réalisé par Jean-François Peyrucat
021_DOS 9/02/05 14:40 Page 21

MESURES 772 - FEVRIER 2005 - www.mesures.com
22
Dossier Ethernet
L
orsqu’à la fin des années 70 les
ingénieurs de Xeroxmirent au point
le réseau Ethernet, ils ne se dou-
taient certainement pas de
l’ampleur qu’il allait prendre. Le protocole
utilisé se distingue d’emblée des protocoles
classiques de type maître-esclave ou à jeton,
où une station ne peut émettre que quand
elle reçoit un signal d’autorisation. Avec
Ethernet, il n’y a pas d’autorisation à
attendre. Simplement, avant d’émettre, une
station doit écouter le réseau pour s’assurer
qu’il n’y a pas de communication en cours :
c’est le protocole CSMA (Carrier Sense Mul-
tiple Access). Dans le cas où plusieurs sta-
tions voudraient émettre en même temps,
un système de détection de collision a été
mis en place (CD : Collision Detection). La
tentative de communication est alors avortée
et chaque station fait une nouvelle tentative
après un temps aléatoire, différent d’une sta-
tion à l’autre. Le risque de collision est alors
beaucoup plus faible (mais il reste présent
car au moment où une station fait une ten-
tative de communication, il est possible que
d’autres cherchent aus-
si à accéder au réseau).
En 1983, le protocole
se normalisa (IEEE
802.3). Les équipe-
ments furent alors
interconnectés en bus
via un câble coaxial
(prise BNC) de
50 ohms RG58 fin
(5 mm : norme
10Base2 ou 802.3a,
publiée en 1985) ou
épais (10 mm :
10Base5). Le 10 Base5
n’est pratiquement plus
utilisé que dans les
environnements per-
turbés (rayonnement électromagnétique) ou
lorsque l’on veut garantir la confidentialité
des échanges (pas de rayonnement du câble
coaxial).
C’est à cette même période que des
constructeurs comme Bay Networks pro-
posèrent de réutiliser les câbles télé-
phoniques, pour diminuer les coûts de
câblage. Ceux-ci sont constitués de
paires torsadées en cuivre, partant d’un
concentrateur (ou hub) vers les équipe-
ments. On passa alors à une topologie
en étoile. IEEE nomme 10BaseT ce
concept à 10 Mbps, les connecteurs sont
de type RJ45.
Les réseaux 10BaseFL, 10BaseFB et
10BaseFP qui allaient suivre reposent sur
le même principe, mais avec un support
différent : la fibre optique. Cette dernière
utilisée au départ pour interconnecter les
réseaux à distance (protocole FOIRL : Fiber
Optic Inter Repeater Link, IEEE 802.3d en
1987), a été adaptée pour les réseaux
locaux. 10BaseFL a été la première norma-
lisation du concept. Le 10BaseFB apporte
en sus un diagnostic d’erreur, à distance.
Quant au 10BaseFP, il spécifie l’utilisation
de concentrateurs passifs. Ne comportant
pas de composants électroniques, il est
insensible aux perturbations électroma-
gnétiques.
Le switch full duplex,
intéressant pour le temps réel
Par la suite, Ethernet connut deux tour-
nants. Le premier survient en 1990 avec
l’apparition des commutateurs ou switchs.
C’est une grosse avancée par rapport aux
hubs utilisés jusque-là. Le concentrateur
(hub) renvoyait les paquets entrants vers
toutes les branches qui lui étaient associées.
Lorsque le réseau était fortement sollicité,
les collisions étaient multiples. Le switch
évite cela. S’appuyant sur le principe de
commutation des standards téléphoniques
(en associant les terminaux aux ports), les
informations transitent directement du
port de la source vers celui du destinatai-
re. Les risques de collisions sont nécessai-
rement diminués.
IEEE normalise cette topologie étoile en
standard 802.3i pour les paires torsadées
et 802.3j en fibre optique. L’apparition du
switch a donné un sérieux coup de vieux
au hub.
Le second tournant vint avec l’augmenta-
tion du débit. L’apparition du Fast Ether-
net (100 Mbps) ou 100BaseT débouche en
1995 sur un nouveau standard, le 802.3u.
Deux ans plus tard, le full duplex associe
un sens de communication à une paire. Le
câble supporte donc les échanges de don-
nées dans les deux sens. Le risque de colli-
sion en est donc écarté. Le CSMA/CD n’est
plus (ou presque) utilisé. Ethernet s’appa-
rente à un “protocole temps réel”.
Depuis, les débits n’ont cessé d’augmenter et
on parle aujourd’hui couramment de giga-
bit Ethernet.
Les topologies en bus
et en anneau reviennent
Ethernet est le standard des réseaux ter-
tiaires. Sa topologie la plus courante est
celle en étoile. Les différentes machines
sont connectées à un switch, qui est lui-
même relié à un commutateur central
de cœur de réseau. Les différents LAN
(réseaux locaux) sont interconnectés au
travers de routeurs. Les câbles utilisés
sont les paires torsadées et fibres
optiques.
Ce type d’architecture (dite “structurée”) se
rencontre en industrie avec quelques adap-
tations de façon à ce que sa gestion soit
souple et décentralisée. C’est par exemple le
Ethernet depuis ses origines
jusqu’aux normes actuelles
▼
Autrefois réservé aux communications entre ordinateurs, Ethernet s’impose de plus en plus comme standard de communi-
cation pour les instruments de mesure (oscilloscopes, enregistreurs, caméras, etc.) et les équipements d’automatismes
(automates, robots, etc.). Ces nouvelles conquêtes, ils les doit aux progrès technologiques incessants et à un travail de nor-
malisation ininterrompu. Ethernet a gagné en vitesse, en robustesse (connecteurs, câbles et composants durcis), il s’intéres-
se de plus en plus au temps réel. A côté de ces atouts très appréciés des industriels, il a quand même un défaut : ouvert à
tous les vents, il est vulnérable aux attaques de virus…
STANDARDS
L’essentiel
Ethernet, c’est déjà plus de
20 ans d’expériences
Avec l’arrivée des switchs
et des connexions full
duplex, Ethernet a com-
mencé à s’intéresser sérieu-
sement aux applications
temps réel
Les topologies ont évolué
elles aussi : pour les appli-
cations industrielles, les
réseaux en anneau et en
bus sont mieux adaptés
que les réseaux classiques
en étoile
La sécurité (la sensibilité aux
virus) reste un problème
022_024_DOS 9/02/05 14:42 Page 22

MESURES 772 - FEVRIER 2005 - www.mesures.com 23
Dossier Ethernet
cas pour la connexion des automates à un
serveur de supervision. Des stations peuvent
servir de relais entre les automates et le PC
central.
Cette architecture a pour inconvénient d’être
plutôt lourde à mettre en œuvre (un câble
pour chaque équipement, de nœud à
nœud, etc.). Les industriels préfèrent des
topologies en bus ou en anneau.
Pour les bus, le coaxial épais (style 10Base5)
sera privilégié pour faire face aux perturba-
tions électromagnétiques.
Les réseaux en anneau peuvent être mis
en œuvre avec n’importe quel support
(cuivre, fibre ou coaxial). Leur intérêt
est la redondance naturelle des liens (si
l’un “tombe”, l’autre prendra le relais).
C’est le cas de l’Hiper Ring proposé par
Hirschmann. Le chemin alternatif est vali-
dé en moins de 500 ms (voire bientôt
en 50 ms).
De façon plus générale, la redondance est
aussi importante lors de la conception des
appareils (alimentation, ventilateurs…) que
Les liaisons en milieu industriel sont souvent soumises à
des perturbations extrêmes. Le choix des composants utili-
sés et plus particulièrement du support de transmission est
donc essentiel. En ambiance perturbée, la fibre optique (FP)
semble être le support le mieux approprié, le coaxial épais
peut être aussi envisagé.
Certains types de paires torsadées peuvent également être
envisagés. Il existe quatre types de câbles. UTP (Unshielded
Txisted Pair) est une première catégorie non blindée. En
milieu perturbé, son utilisation est bien évidemment à ban-
nir. Deux blindages sont possibles. Le premier, STP (Shiel-
ded Twisted Pair) consiste à insérer une tresse métallique.
Le second, FTP (Foiled Twisted Pair), est constitué d’une
mince feuille d’aluminium ou feuillard. La combinaison des
deux, SFTP, donne un plus dans un envi-
ronnement perturbé. Notons aussi que
le fait de croiser perpendiculairement
avec une ligne à courant fort n’altère
pas des données.
Les connectiques associées doivent
également être adaptées à l’environne-
ment. Les prises RJ45 standards ont été
améliorées pour assurer l’étanchéité et
la robustesse mécanique nécessaires.
Un autre type de connecteur semble
être en passe de s’imposer : il s’agit du
connecteur cylindrique M12.
L’importance du choix du support de transmission
Coaxial
Thin Câble fin Lié au protocole 10b2, il n’est presque plus utilisé
Thick Câble épais Lié au standard 10b5, il est peu sensible
aux perturbations électromagnétiques
Paires torsadées
UTP Unshielded Twisted Pair Câble non blindé
STP Shielded Twisted Pair Câble blindé avec une tresse métallique
FTP Foiled Txisted Pair Câble blindé avec une mince feuille d’aluminium
ou feuillard
SFTP Shielded Foiled Twisted Pair Câble reprenant les propriétés STP et FTP
Les principales catégories de câbles
Trame 1
Trame 3
Tentative
d'émission
simultanée Délai aléatoire
Trame 4
CSMA/CD
CSMA
Station 1
Station 2 Trame 2
Station 3
Station 4
La station qui veut envoyer des données sur le réseau doit commencer par s’assurer que celui-ci est libre. Si ce n’est pas le cas, elle attend. Ici, la station 2 écoute le réseau et s’aperçoit que la station 1 diffuse. Elle
attendra pour émettre à son tour.
Les stations 3 et 4 souhaitent émettre et s’assurent que le réseau est libre. Mais elles émettent simultanément. Il y a collision. La tentative d’émission est avortée. Les deux stations referont une nouvelle tentative
un peu plus tard, après un délai aléatoire.
Principe du CSMA / CD
022_024_DOS 9/02/05 14:42 Page 23

MESURES 772 - FEVRIER 2005 - www.mesures.com
24
Dossier Ethernet
pour la topologie du réseau. En étoile, il
existe le Spanning Tree (STP, RSTP, MSTP)
qui permet de faire face aux ruptures de liai-
son en proposant des chemins alternatifs.
Le temps de bifurcation est inférieur à la
seconde. Une autre technique est le Load
Balancing. Celle-ci consiste à considérer
deux liens redondants et de considérer un
maître (à défaut, un esclave) actif quand le
maître ne répond pas.
Sécurité : ça reste un problème
La force d’Ethernet, c’est d’être un
réseau ouvert, accessible à tous les équi-
pements, et plus particulièrement aux
PC. C’est aussi son talon d’Achille. Ether-
net peut en effet serveur à véhiculer des
virus qui peuvent perturber gravement
le fonctionnement d’une installation. Du
coup, la sécurité est le cheval de bataille
actuel de nombreux administrateurs sys-
tèmes et réseaux (règles de firewalling,
VPN, antivirus, cryptographie…). Si les
conséquences d’une malveillance en
milieu tertiaire peuvent être assez
néfastes, celles en industrie sont nette-
ment plus graves.
Idéalement, les réseaux d’usine et de
bureau devraient être dissociés. Mais
malheureusement, ce n’est pas tou-
jours possible. Des règles de firewal-
ling doivent être en sus appliquées
pour ne filtrer que les ordinateurs
autorisés à superviser les machines. De
la même façon, il est utile de mettre
au point des VPN sécurisés pour les
accès distants. Une autre solution
consiste à implémenter le protocole
802.1x, qui normalise un relais
d’authentification auprès d’une base
Radius… en niveau 2. Ceci peut être
utilisé notamment pour la supervision
des équipements depuis des postes exté-
rieurs.
Toujours est-il que l’apport de la sécu-
rité ralentit forcément le système et
dans ces conditions il est préférable de
ne pas avoir des exigences temps réel
trop fortes.
Une alternative
aux bus de terrain ?
Les contraintes de temps réel et de sécu-
rité semblent ainsi laisser encore de
beaux jours aux bus de terrain. Pourtant,
Ethernet est de plus en plus rapide (le
10 gigabits cuivre sera bientôt dispo-
nible), les commutateurs évitent les col-
lisions qu’on rencontrait jadis avec les
hubs, la qualité de service semble aussi
être mieux gérée...
Toutefois, de par sa simplicité, le pro-
tocole n’est pas sécurisé. L’implémen-
tation de liens redondants blindés et de
systèmes de sécurisation logiques (pare-
feu, VPAN, Qualité de Service) va net-
tement alourdir le coût et brider les per-
formances.
Pour s’affranchir des risques de virus,
la solution la plus simple serait de
séparer les réseaux, et bannir bien évi-
demment des accès vers l’extérieur,
mais ce n’est pas toujours possible.
FL
Coaxial
10Base2 câble “fin” (5 mm) Petits réseaux (distance du bus : 200 m et pour 30 stations)
10Base5 câble “épais” (10 mm) Réseau fédérateur (distance du bus : 500 m pour 100 stations)
Cuivre
10BaseT 10 Mbps cuivre distance maximale d’une branche : 100 m
Fibre optique
FOIRL 10 Mbps fibre Interconnexion de sites. Distance maximale : 1 000 m
10BaseFL 10 Mbps fibre Réseaux. Distance maximale : 2 000 m
10BaseFB 10 Mbps fibre Idem avec diagnostic d’erreurs
10BaseFP Idem, avec concentrateurs passifs Idem avec concentrateur passif. Distance : 500 m
Les premiers réseaux Ethernet à 10 Mbps
Réseaux 10 Mbps
802.3i 10 Mbps 1990 - Première normalisation des réseaux en étoile cuivre à 10 Mbps
802.3j 10 Mbps 1990 - Idem avec fibre optique
Réseaux 100 Mbps
802.3u 100 Mbps 1995 - Fast Ethernet
802.3x 100 Mbps 1997 - Full duplex : une paire cuivre ou fibre par sens.
Réseaux 1000 Mbps
802.3z 1000 Mbps 1998 - Gigabits Ethernet
802.3ab 1000 Mbps 1999 – Gigabits Ethernet sur paires torsadées
Réseaux 10 Gbps
802.3ae 10 Gbps 10 Gbps fibre
802.3an 10 Gbps 10 Gbps cuivre (à venir courant 2005-2006)
Télé-alimentation
802.3af Télé-alimentation Les données et l’alimentation électrique transitent par le même câble
(paires torsadées uniquement)
Les normes Ethernet réseaux en étoile
802.1D Transparent Bridge Cette norme précise le fonctionnement d’un commutateur. A chaque port
est associé un groupe d’adresses MAC relatifs à des équipements donnés.
Si une machine A désire communiquer avec une B, le switch recherchera le destinataire
dans ses tables et liera les deux ports associés. Si son adresse n’est pas présente,
le commutateur émettra un “broadcast” pour localiser B et l’entrer dans ses stables.
802.10 Correspond aux besoins de segmentation du trafic et de sécurité
802.1P Priorisation des paquets Association de chaque paquet une priorité donnée
802.1Q Tagging des paquets La gestion des priorités de paquets est gérée de manière implicite depuis
le commutateur ou explicite en les marquant physiquement.
Les normes IEEE de gestion de flux
dans les commutateurs
022_024_DOS 9/02/05 14:42 Page 24

MESURES 772 - FEVRIER 2005 - www.mesures.com 25
Dossier Ethernet
P
ratiquement tous les instruments
de mesure et les équipements
d’automatismes industriels com-
portent désormais une interface
Ethernet. Il n’y a donc pas beaucoup de pla-
ce pour le doute : après avoir terrassé tous ses
concurrents dans les applications bureau-
tique, Ethernet va s’imposer dans les appli-
cations industrielles. Dans ces conditions,
on pensait que la journée Ethernet organisée
par le Club Automation au mois d’octobre
serait un plébiscite en faveur de ce réseau.
Ce triomphe annoncé était d’autant plus
assuré que la plupart des intervenants étaient
des fournisseurs de produits Ethernet, et
qu’on ne s’attendait donc pas à ce qu’ils aient
de la retenue. Et puis, ça ne s’est pas passé
comme prévu. C’est surtout PSA qui est venu
gâcher la fête. Le constructeur automobile
utilise massivement Ethernet dans ses appli-
cations bureautique et même dans certaines
applications d’atelier (pour réaliser les com-
munications entre les unités centrales et les
équipements industriels intelligents, tels que
des robots et des visseuses par exemple).
Mais pas question de descendre au niveau
des entrées/sorties et des capteurs/action-
neurs, a indiqué Laurent Mauguy (PSA), en
conclusion de son intervention : « Pour pré-
tendre remplacer un réseau de terrain, Ethernet devra
démontrer qu’il apporte une avancée concrète par rapport
aux solutions actuelles ». Sous-entendu : ce n’est
pas le cas actuellement.
La conclusion est sévère mais les interven-
tions qui avaient précédé avaient en quelque
sorte préparé le terrain. A commencer par
celle de Jean-Dominique Decotignie (CSEM)
qui avait débuté la journée en rappelant ce
qu’est Ethernet, ses avantages et ses incon-
vénients.
Haut débit n’est pas synonyme
de temps réel
Il fut beaucoup question de temps réel. Un
vieux reproche fait à Ethernet dans sa ver-
sion courante, c’est son manque de déter-
minisme, lié au mécanisme CSMA/CD, qui
oblige une station à attendre si le réseau est
occupé, et à attendre à nouveau si, au
moment où elle veut prendre la ligne, une
autre se met à émettre (détection de colli-
sion). « C’est vrai que l’on ne peut pas garantir qu’un
message passera dans un temps borné. Mais il faut rela-
tiviser. Dans les applications industrielles de terrain, les
industriels utilisent à peine quelques pourcents de la ban-
de passante de leur réseau Ethernet. Autant dire qu’il est
quasiment temps réel et ce n’est pas forcément la peine
de faire appel à un “Ethernet temps réel”… ». Il faut
savoir qu’un Ethernet temps réel, qu’il soit
basé sur du logiciel (organisation de la ges-
tion du trafic) ou du matériel (utilisation de
switchs au lieu de hubs), introduit des
retards dans les transmissions de données.
Cependant, ce retard est connu et le temps
de rafraîchissement d’une station est borné,
ce qui répond à l’attente des industriels. Pour
les applications temps réel, une avancée
importante est apparue récemment avec
l’arrivée de la norme IEEE1588, qui permet
de réaliser des synchronisations d’horloges
très précises dans les automatismes répartis.
Cela dit, Ethernet a d’autres avantages. Deux
sont plus particulièrement importants. Le
premier, c’est son ouverture à tous les sys-
tèmes informatiques placés au-dessus des
équipements d’atelier, y
compris (via Internet)
ceux qui se trouvent en
dehors du site industriel.
Le deuxième, c’est son
débit, qui atteint
10 Gbit/s aujourd’hui,
un chiffre incomparable-
ment plus élevé que celui
des bus de terrain actuels.
Comme les applications
imposent de transmettre
des quantités toujours
plus importantes d’infor-
mations (des images
issues de capteurs de
vision sur une chaîne de
Ethernet industriel soulève
beaucoup de questions…
▼
Le Club Automation a organisé récemment une journée débat sur Ethernet industriel. Si les développements en cours pré-
sentent un intérêt que personne ne conteste, ils soulèvent aussi beaucoup d’interrogations, notamment en termes de
coût et de sécurité…
JOURNÉE-DÉBAT DU CLUB AUTOMATION
L’essentiel
Ethernet a beaucoup évo-
lué pour répondre aux
contraintes industrielles
Les avancées se situent à
tous les niveaux : compo-
sants durcis, déterminisme,
synchronisation précise
des différentes stations
La sécurité d’accès et les
risques de piratage inquiè-
tent les industriels
Ils attendent aussi un peu
de stabilité et ne veulent
pas perdre les acquis des
bus de terrain
Quelques exemples des "acquis" des bus de terrain que PSA aimerait oublier avant de passer à Ethernet industriel !
1- Boîtier de coupleur de bus ouvert dans un chemin de câbles.
2- Non respect des rayons de courbure (mauvais passage du signal, câble abimé.
3- Câbles de puissance au voisinage des câbles bus de terrain (Profibus).
4- Mise à la terre des câbles réseau… avec des colliers isolants.
1
3
3
4
2
025_027_DOPE772 Club Automation 9/02/05 14:43 Page 25
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%