LES LIDARS.RADARS

Synthèses bibliographiques des doctorants de seconde année
Nouyn,q.ux coNcnprs DE r,Ib,tn A DETECTToN DTRECTE ET
MODT]LATION D,INTENSITE HAUTE F'REQUENCE :
LES LIDARS.RADARS
G. Pillet, L. Morvan, D. Dolfi, J.-P. Huignard,E.Rosencher*
THALES Research and Technology
RD 128
91,767 Palaiseau CEDEX
Tél : +33 (0)l 69 41 55 I I
Le lidar-radar, à l'instar du radarl, du lidar2 et du sonar3 est un système de détection à
distance actif. A contrario d'un système d'imagerie, il ne permet pas de connaître précisément
la répartition transverse d'une cible mais a pour objectif de mesurer d'autres paramètres tels
que la forme longitudinale (le profil) et la vitesse à longue portée.
Bien que tous les systèmes de détection actifs ont des principes de fonctionnement
similaires, ils peuvent présenter des performances très différentes du fait de la nature de
l'onde (électromagnétique ou acoustique) et de la longueur d'onde utilisée : les radars
émettent des ondes radiofréquences (centimétriques) tandis que les lidars émettent des ondes
optiques (micrométriques). Le lidar-radar utilise quant à lui une onde optique avec une
modulation d'intensité radiofréquence.
Le lidar-radar a été initialement proposé pour la mesure de la vitesse du vent [1]. De
nombreuses autres applications possibles ont été démontrées comme la cartographie sous-
marine à haute résolution l2l,la détection sous-marine [3] ou l'imagerie médicale [4]. L'axe
de développement de cette étude bibliographique portera sur une application du lidar-radar
peu étudiée jusqu'à lors : la détection et la caractérisation de cibles solides aéroportées
(comme des avions par exemple).
L'objet de cette synthèse bibliographique est de comparer les performances accessibles des
différents types de système de détection électromagnétique actif pour la détection et la
caractérisation de cibles solides aéroportées. Elle est structurée en trois parties :
- Dans la première partie, nous présenterons une synthèse des principes généraux des systèmes
de détection communs aux références [5], [6] et [7] pour introduire les deux paramètres qui
nous serviront de référence : la signature Doppler et le profil spatial. Ces deux paramètres
permettent de distinguer des cibles multiples ainsi que de les identifier.
- Dans la seconde partie, consacrée à la référence [8] , nous présenterons l'état de l'art des
systèmes radar à haute résolution car les principes mis en jeu sont semblables à ceux utilisés
en lidar-radar.
- Dans la troisième partie, nous réaliserons une analyse comparative des différentes
technologies existantes de radar et de lidar pour préciser les contextes d'utilisation possible
d'un lidar-radar.
' Emmanuel Rosencher : ONERA -BP 72 - 29 avenue de la Division Leclerc - 92322 - Châtillon CEDEX
t RAdio Detection And Ranging
't-tght Detection And Ranging
3 Sound Navigation And Ranging
Bulletin POLOQ 2007-2 ts3/177

Synthèses bibliographiques des docûorants de seconde année
1 DUTTNITION DES PARAMETRES <( HAUTE RESOLUTION »}
Les principes généraux des systèmes de détection à distance sont communs et bien connus.
On les retrouve dans tous les manuels consacrés au sujet t5]t6]t71. Afin de disposer de tous
les outils nécessaires à l'étude comparée des différents dispositifs èxistants (dans la partie 3),
nous les avons spthétisés dans cette partie.
1.1 Pnnqcpp cENERAL
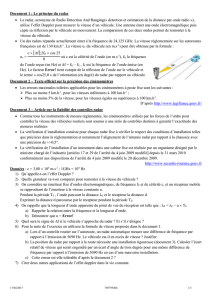
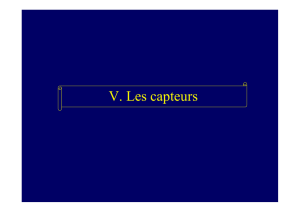
Le schéma des systèmes de détection électromagnétique actifs est le suivant: on dispose
d'un émetteur pointé vers une cible distante, d'un récepteur (généralement au même endroit
que l'émetteur) pennettant de capter I'onde rétrodiffrrsée par la cible et d'une chaîne de
traitement du signal (voir la figure l).
* B(t) . Détection
. Estimation : distancq rrffesse,..,
Figure 1 : Shéma de principe d'un système de détection électromagnétique actif
Si la cible est suffisamment éloignée de l'émetteur et si on néglige les turbulences
atmosphériques, on peut considérer que la cible est uniformément éclairée par une onde
incidente d'amplitude A(t) et qu'il en est de même pour le récepteur (réception monomode)
qui reçoit B(t).De plus, nous considérons des cibles « surfaciques » dans le volume desquelles
les ondes électromagnétiques ne se propagent pas. IÆ signal rétrodiffirsé B(t) rcçu est la
tuansformation de A(t) paf, un filtre linéaire réel causal quelconque :
B(t) * !r(,,, - :)r(, - 7)-
où c est la célérité de la lumière et F(z,t) est le profil spatial « au sens large » de la cible, c,est-
à-dire la densité de surface rétrodiffrrsante apparente (homogène à une longueur) en fonction
de la distance au capteur. Notons que tout l'intérêt du syitème est d,étidier B(t) afin de
caractériser la fonction F(z,t) (lasource d'information). Des hypothèses sont nécessaires car la
fonction d'analysel n'est fonction que d'une seule variable contre deux pour la fonction F.
1.2 snælrncanoN DU pRoBLEME - pRoFrL spATrAL ET sTGNATURB DoppreR
Voici la première hypothèse couramment admises pour l'étude du profil spatial (( au sens
large » F':
- Première hypothèse: nous considérons que le diagramme de rayonnement de la cible éclairée
par I'onde électromagrrétique est constitué de « points brillants », c'est à dire que F n'est pas
une fonction _ continue mais plutôt une soilrme finie de pics de Oirac4 :
F(z,t)= I r, (r)aQ _ ,,0)
j<n
a On note âla fonction de Dirac en zéro. Cette hypothèse se comprend aisément si l,on considère que la cible
n'est pas diffirsante mais spéculaire par parties, "'".t-à-dir" qu" ,"ui", les surfaces orientées perpendiculairement
au plan d'incidence rayonnent un signal en direction du détecteur. Cette hypothèse est certainement un peu
réductrice pour les fréquences optiques.
Bulletin POLOQ 2007-2 t54lt77

T
Synthèses bibliographiques des doctorants de seconde année
Pour l'étude des distances et des vitesses des points brillants, nous faisons deux hlpothèses
supplémentaires :
- Deucième hypothèse: nous considérons de plus que chaque point brillant a une vitesse
uniforme pendant la durée de la mesure : z j(() = z jo + ÿ jot
- Troisième hypolhèse: nous considérons enfin que I'intensité rétrodiffusée par chaque point
brillant ne varie pas pendant la durée de la mesure , Fr(()= Fp
Sous ces hypothèses, l'expression mathématique du signal rétrodiffrrsé par la cible se
simplifie et on obtient :BQ)*I4.,e(r -zv,of c).t-2z,of c)
jsn
La distance est donc un effet retardant tandis que la vitesse est un effet de dilatation (ou de
compression) temporelle. Dans cette synthèse bibliographique, nous n'étudierons pas les
méthodes possibles pour déterminer les triplets ( Fio , zio, vlo ) qui nécessitent des hypothèses
supplémentaires. Nous n'étudierons que le profil spatial de la cible c'est-à-dire les oouples
(Fio, zio ) et sa signature Doppler c'est-à-dire les couples (Fio,vio).
Pour la suite de la synthèse bibliographique, il est utile d'exprimer la transformée de
Fouriers du signal reçu en fonction de celle du signal émis. En considérant que les vitesses v;o
sont très inferieures à la vitesse de la lumière c, on obtient :
(1)
E (a) * Z p,,Z(r,rtr + zu,o f ")). "a?
j<n (2)
2 Er T DE ÿART DES SYSTEMES RADARS A HAUTE RESOLUTION
Le radar a connu un extraordinaire développement depuis la seconde gueffe mondiale. De
ce fait, il existe une très grande variété de systèmes. Comme nous I'avons souligné en
introduction, nous ne nous intéressons qu'aux systèmes à haute résolution. La réference [8] est
un livre exhaustif sur le sujet :
t8] D.R. Wehner, High-Resolution Radar 2"d edition,Artech House, 1994
Le but de cette partie est de montrer les méthodes usuelles pour la détermination de la
signature Doppler, du profil spatial et du profil spatial « synthétique ».
2.I DBTecnoN CoHERENTEETINCoHERENTE.
La référence [8] distingue deux ÿpes de détection, la détection cohérente et la détection
incohérente. En effet, sous I'hypothèse des enveloppes lentement variables, les champs
électriques contiennent deux informations : une phase ç et we intensité L Les systèmes
cohérents reposent sur l'étude de la phase tandis que les systèmes incohérents reposent sur
l'étude de l'amplitude. La détection des systèmes incohérents est une simple mesure de
puissance instantanée et donne directement Is(t). La détection des systèmes cohérents fait
intervenir le mélange du signal rcp B(t) avec le signal émis A(t) à l'aide de mélangeurs
électroniques. On obtient alors un signal proportionn el à exp(t(çn - A)).
5 On note ;f la transformée de Fourier de f par rapport au temps l, avec û)la variable fréquentielle associée.
Bulletin POLOQ 2007-2 t55lt77

Synthèses bibliographiques des doctorants de seconde année
Les deux études de signature Doppler et de profil spatial font intervenir des analyses
spectrales, c'est pourquoi les systèmes à haute résolution font toujours intervenir une
numérisation du signal reçu dans le but de réaliser des transformées de Fourier disuète.
2.2 DSTERMINaTIoN DE LA SIGNATURE DoPPLER
Pour l'étude de la signafure Doppler, le signal envoyé est classiquement une onde
monochromatique (de pulsation ûh: 2nf6) et la détection est cohérente. La transformée de
Fourier du signal envoyé est donc une fonction de Dirac à la pulsation oh. En reprenant les
hypothèses de la première partie et l'équation (2), on obtient le spectre du signal reçu (après le
mélange de la détection cohérente) :
E(a) *|r,,a(,- r,Qu,o I")).r'1"'
j<n
Le spectre du signal reçu est donc une somme de fonctions de Dirac. Chacune de ces
fonctions étant associé à la vitesse et à l'amplitude recherchée. Néanmoins, la résolution en
vitesse â, est limitée du fait de l'utilisation d'une FFT sur un temps d'acquisition fini 7:
^c
ù=w
Pour augmenter la résolution on a deux possibilités : augmenter la fréquence du radar ou
augmenter la durée d'acquisition. Remarquons tout de même qu'il ne faut pas que la vitesse
de la cible varie plus que la résolution pendant le temps d'acquisition. Ceci donne une limite
de résolution imposée par I'accélération maximale a. de la cible. De plus, du fait de la
numérisation à la fréqueîcef1, il existe une ambiguiTé Âv en vitesse donné par le théorème de
repliement spectral de Shannon. Cette ambiguïté doit êhe supérieure à la vitesse maximale
v^* de la cible.
On a donc : ôv <T .o^o a &-o =W , aÿ="* et .furTu**
En conclusion, pour une catégorie de cible (v^* et a^o, données), la résolution maximale
tt^* est fixée par la fréquence du radar. Elle est associée à une fréquence d'échantillonnagefB
et à un temps d'acquisition 7.
2.3 DsrERr\,flr.IarloN cLASSIQUE DU pRoFIL SpATIAL
L'étude classique du profil spatial utilise une détection incohérente en envoyant des
impulsions créneaux de durée c àla fréquence de répétitionf,"r. C'est en fait une mesure de
distance par temps de vol. Dans cette mesure, on considère la vitesse de la cible comme nulle.
Dans ce cas simple, aucune analyse fréquentielle n'est pas nécessaire et les résultats suivants
se comprennent intuitivement à partir de l'équation (1). Sous ces hypothèses, le signal reçu
est :
Bb)*ZF,,AQ -zr,o f ,)
j3n
La résolution & obtenue est la taille de l'impulsion cî.La fréquence d'échantillonnagefB
doit être adaptée à l'impulsion émise :fB>l/2r.
De même que pour l'étude de la vitesse, il existe une ambiguilé distance Az ùæ à la
fréquence de répétition des impulsions : Lz = cf Zf*o .
Bulletin POLOQ 2007-2 t56lt77

{
Synthèses bibliographiques des docûorants de seconde année
Le temps d'analyse T" doit être supérieur au temps d'aller-retour d,une impulsion pour la
portée zr*du système i T, =22*f c.
2.4 DBTemanTIaTIoN DU PRoFIL SPATIAL PAR RESoLUTIoN sYNTÏIETÏQUE
En plus du traitement présenté au paragraphe précédent, le radar permet de faire un
traitement cohérent du signal reçu. Il émet des tàins àe È impuision, ,u. pà.t"rse, la pulsation
de Ia porteuse évoluant linéairement d'impulsion à impulsi in de at a axp*p*i. âar Dans
un premier temps, l'enveloppe des impulsions est traitéi comme dans le pà"*"pfr" ,récédent.
Si après cette opération on détermine que le profil de la cible a une dimension inferieure à la
résolution À2, on éfudi9 la phase de la porteuse des impulsions avec une détection cohérente
pour augmenter la résolution. D'après l'équation (2), on obtient l'expression du signal reçu,
pour I'impulsion de pulsation al (après le mélange de Ia détection cohÈrente) :
E,* 14, .ra?
j3n
La suite des E, correspond à Ia transformée de Fourier discrète du profil spatial.
Comme pour le cas de la signature Doppler, à cette transformée de Fourier discrète sont
associées une résolution &" et une ambiguité Àzr. Du fait de la taille zdes impulsions, Ia
resolution fréquentielle de la porteuse est limitée par l/2c Il est donc inutile de chàisir un pas
de ûéquence inftrieur à cette résolution. De plus, il est nécessaire d,avoir une ambiguîîé
supérieure à la résolution donnée par les impulsions. on trouve :
Lr" = "? , L. 6@<2fi
o(ùîT 2n
et ù"=C-@"-@t
Pour conclure, nous avons résolu les fréquences basses (de 0 à l/2c) duprofil spatial avec
I'enveloppe des impulsions et les fréquences hautes (de qà ag; avec la phase de la porteuse.
Nous avons présenté les formes d'onde couramment utilisées pour l,étude du profil spatial
et de la signafure Doppler pour les radars à haute résolution. Nous allons maintenant utiliser
ces concepts pour déterminer les résolutions accessibles aux radars ainsi qu,aux lidars.
3 AxtysB coMpARATrvE
-- L'objet de cette partie est de comparer les différentes solutions existantes pour la détection
électromagnétique active à haute résôlution. Pour la comparaison nous choisissons une vitesse
maximale v. de 1000 m.s-r et une accélération maximale "-* ai i i.JÜil àt aaequut
pour la majorité des cibles aéroportées.
3.1 LSRAneRAHAUTEREsoLUTToN
L1référence [8] nou§ pennet de déterminer les performances accessibles aux radars à haute
résolution' Typiquement, le_s radars aéroportés peuvent atteindre des portées supérilures à g0
km' Leur fréquence peut aller jusqu'à tO crrr. Ils peuvent émettre des impulsions de I ps
qoy le9 études profîlométriques. IIs peuvent balayer la fréquence porteuse sur 250 MrIz.
Enfin, la taille des antennes excède rarement le mètre oè aiamitre. o,apres h partie
précédente on trouve :
' Laprécision vitesse est 0,55 m.s't pour un temps d,acquisition de 2g ms.
' La fréquence d'échantillonnage est donnée parla duréà des impulsions : 500 kHz.
' La précision en profilométrie simple est 300 m et la précision synthétique est 1,2 m.
- La sélectivité angulaire est 30 mrad.
Bulletin POLOQ 2007-2 157fi77
 6
7
8
9
6
7
8
9
1
/
9
100%