Information industrielle : Linux renforce son intérêt pour le temps réel

MESURES 818 - OCTOBRE 2009 - www.mesures.com 31
S
olutions
INFORMATIQUE INDUSTRIELLE
Linux renforce son intérêt
pour le temps réel
Linux gagne chaque jour des parts de marché dans le secteur de l’informatique
embarquée. Seul frein à cette généralisation : son manque de déterminisme. A
l’inverse, les systèmes d’exploitation temps réel sont capables des meilleures
performances mais restent très, voire trop spécialisés. Voici quelques pistes pour
vous aider à choisir entre Linux et un système d’exploitation temps réel.
Il existe une grande différence entre les
systèmes d’exploitation temps réel et
les systèmes d’exploitation basés sur
Linux. Les premiers, aussi appelés
RTOS (pour Real Time Operating Systems)
sont des systèmes propriétaires conçus spé-
cialement pour effectuer du traitement déter-
ministe. Les seconds font partie du monde
des logiciels libres. Il s’agit de systèmes d’ex-
ploitation généralistes (GPOS, pour General
Purpose Operating System), davantage portés
sur les applications bureautiques.
Le mariage des deux philosophies (logiciel
libre et traitement temps réel) suscite un
intérêt évident pour les utilisateurs industriels.
Les éditeurs travaillent donc depuis
longtemps sur le sujet. Différentes techni-
ques ont été mises au point pour conférer à
Linux des capacités de traitement temps réel.
On distingue deux principales méthodes :
rendre le noyau préemptif ou ajouter un
second noyau temps réel.
Transformer Linux
en un OS temps réel
Rendre le noyau préemptif (on parle aussi
de “kernel préemptif”) revient à modifier le
noyau de Linux afin d’associer aux différentes
tâches des niveaux de priorité, les tâches
prioritaires “prenant la main” sur les autres.
Cela réduit le temps pendant lequel le noyau
traite des sections de code non prioritaires.
Cette approche nécessite l’installation d’un
patch spécifique sur le noyau Linux, une
méthode difficile à appliquer lorsqu’il s’agit
d’assurer le suivi ou la mise à niveau d’un
grand parc d’équipements. Sans compter
que, pour les applications critiques nécessi-
tant une certification (norme aéronautique
DO-178B ou norme de sécurité
IEC 61508, par exemple),
c’est tout l’ensemble noyau
et patch qui doit être certifié
à chaque modification ou
changement du patch.
Cette méthode requiert par
ailleurs un grand savoir-faire
si l’on veut assurer un déter-
minisme poussé. En effet, la charge
du processeur est répartie entre les tâches
prioritaires et non prioritaires, mais il peut
arriver que certaines instructions non prio-
ritaires soient trop complexes ou trop
longues pour le temps qui leur est accordé
à chaque temps de cycle. C’est donc souvent
l’application tout entière qui doit être adaptée
afin de réduire la taille de ces instructions.
Un travail fastidieux, qui nécessite de tester
absolument toutes les instructions du noyau.
De plus, ces tests doivent être réalisés dans
des conditions de charge processeur proches
de celles qui seront rencontrées dans l’envi-
ronnement réel de l’application, ce qui est
quasiment impossible dans la pratique. Du
coup, même si cette méthode est efficace en
théorie, la complexité du noyau Linux est
telle qu’il sera difficile de garantir le déter-
minisme final d’une application.
De nombreux projets Open Source sont en
cours au sein de la communauté Linux afin
d’optimiser les caractéristiques préemptives
du noyau. Le plus significatif reste le projet
“Preempt_RT”, initié par Ingo Molnar. Ce
patch préemptif apporte beaucoup de
modifications au
noyau, notamment en
ce qui concerne les
drivers de périphéri-
ques. Même si dans la
plupart des cas le patch
préemptif reste com-
patible avec les drivers
standard, les perfor-
mances et le fonction-
nement des périphé-
riques ne sont pas
garantis. Tous les an-
ciens drivers doivent
faire l’objet d’une
nouvelle validation
lors du passage à un
noyau préemptif, ainsi
qu’à chaque installa-
tion de nouveau péri-
phérique. L’approche
préemptive suscite
Les outils de développement
temps réel se diversifient.
Les ingénieurs systèmes ont
maintenant le choix entre un
OS Linux et un OS spécialisé
dans le temps réel.
Il existe plusieurs méthodes
pour fournir à Linux des
caractéristiques temps réel.
Linux présente l’avantage
d’un coût moindre
(pour de grandes séries) et
peut même convenir
pour les applications temps
réel “dur”.
Les RTOS continuent de
s’imposer sur le marché
des applications critiques.
L’essentiel
Automaticiens et roboticiens utilisent couramment des RTOS pour
leurs applications temps réel. Mais Linux aussi sait se montrer
déterministe, avec la possibilité d’utiliser des logiciels génériques.
➜

MESURES 818 - OCTOBRE 2009 - www.mesures.com
32
S
olutions
MESURES 818 - OCTOBRE 2009 - www.mesures.com 33
S
olutions
Un système temps réel se définit par sa capacité à exécuter une tâche
dans un intervalle de temps donné. Cette caractéristique est appelée
le déterminisme. Bien entendu, chaque application impose un temps
de réponse différent, plus ou moins long selon les cas. Si certaines
peuvent se satisfaire d’un temps de réponse moyen, avec des valeurs
tantôt au-dessus et tantôt en dessous de la valeur annoncée, d’autres
ont absolument besoin d’une synchronisation fine. Elles ne peuvent
accepter aucun dépassement du temps de réponse, au risque de
déclencher un plantage de tout le système. C’est pourquoi les applications
déterministes se divisent en deux catégories : on distingue le traitement
temps réel “dur” du traitement temps réel “mou”.
Le temps réel “mou” fournit la garantie que le processeur garde
suffisamment de ressources disponibles pour effectuer une tâche
prioritaire dans un délai imparti. Typiquement, on optera pour
des systèmes d’exploitation généralistes tels que Linux pour répondre
à ce genre d’applications.
Avec le temps réel “dur”, à l’inverse, on cherche davantage à surveiller
le temps de réponse qu’à mesurer les ressources disponibles
dans le processeur. La criticité concerne le temps que met le système
à répondre (ou réagir) à un événement. Concrètement : on ne doit jamais
manquer de traiter un événement ou une interruption. Ces besoins
en temps réel dur sont encore plus rigoureux lorsqu’il s’agit,
par exemple, d’un calculateur d’ABS automobile. Car aux besoins
en temps de réponse très courts s’ajoutent toutes les contraintes
liées à la sécurité du conducteur. Toutefois, le temps réel dur n’est pas
toujours systématiquement employé. C’est le cas, par exemple,
du traitement audio sur un ordinateur : pour le décodage d’une piste
sonore classique, échantillonnée à 44,1 kHz, le logiciel a besoin
de transférer 32 bits de données vers le matériel toutes les 22,7 micro-
secondes ! Aucun système d’exploitation généraliste n’est capable
d’atteindre ces vitesses de traitement, d’autant que d’autres services,
qui s’exécutent en parallèle, peuvent retarder le système et entraîner
des coupures dans le son. C’est pourquoi on utilise une mémoire
tampon pour compenser ces délais. En remplissant cette mémoire
seulement toutes les 0,1 seconde, on résout un problème de temps réel
dur matériel en utilisant un système d’exploitation temps réel mou.
Toutes les applications dans les domaines de l’aérospatiale,
de la Défense, du contrôle industriel, de l’instrumentation,
de la robotique et des télécoms demandent des temps de traitement
inférieurs à la microseconde et une priorisation des tâches.
Temps réel “dur” et temps réel “mou” se font face
mode “kernel”. Contrairement aux OS
généralistes, ils n’incluaient aucun méca-
nisme d’abstraction pour faciliter les com-
munications entre l’OS et les périphériques.
Cela obligeait les développeurs à travailler au
plus près du matériel. Toutes les communi-
cations entre équipements devaient être
définies par le programme, avec le risque
d’erreurs que cela entraîne. Le temps de
débogage pouvait être très long même pour
un développeur expérimenté.
Heureusement, la puissance des processeurs
augmentant, les dernières générations de
RTOS disposent de mécanismes pour exécuter
des processus non critiques en parallèle des
tâches temps réel. On appelle ces processus
des modes “utilisateur” ou “user mode”. Le
développement de certaines applications
s’effectue alors dans un environnement dif-
férent du mode kernel, et chacun des deux
noyaux utilise un secteur distinct de la
mémoire. Les applications ainsi créées béné-
ficient toujours des performances détermi-
nistes du RTOS, mais disposent d’une
mémoire séparée pour exécuter toutes les
autres tâches annexes. Cela facilite le travail
des développeurs, qui n’utilisent qu’un seul
environnement de programmation.
La comparaison des performances
Avec les fonctions Preempt_RT disponibles
pour le noyau Linux, des niveaux de priorité
peuvent être associés au traitement de
certaines interruptions. Mais les temps de
traitement restent sujets à variations. On
réservera cette méthode à des applications
de contrôle fin, mais non critique. On parle
de temps réel “mou”. Les cœurs temps réel
rendent possible, quant à eux, un traite-
cations pouvant être chargées directement
dans le cœur temps réel. Concrètement, il
faut utiliser un format identique à celui des
systèmes de fichiers et des pilotes de péri-
phériques. Le cœur temps réel communique
directement avec le matériel. On parle
d’“exécution en mode kernel” car l’applica-
tion temps réel s’exécute dans le noyau temps
réel comme s’il s’agissait d’un driver.
Pour résumer, l’approche préemptive a
l’avantage de faire partie intégrante du
monde Linux, et convient bien au dévelop-
pement d’applications temps réel “mou”,
puisqu’elle ne peut pas garantir un véritable
déterminisme. A l’inverse, mettre en place
un cœur temps réel nécessite en quelque
sorte de “s’écarter du monde Linux” (ce
type de cœurs n’est d’ailleurs pas supporté
par la licence GPL). Une approche non stan-
dard, donc, mais qui fournit l’assurance d’un
temps réel “dur” (à condition bien sûr
d’écrire les applications afin qu’elles s’exé-
cutent directement sur ce cœur).
Le choix d’utiliser un RTOS
Ces deux approches tendent à apporter à
Linux les fonctionnalités temps réel qui lui
font défaut. Mais bien entendu, il est possible
d’opter pour la solution inverse : ajouter à un
RTOS la capacité d’exécution de fonctions
non critiques.
L’architecture de base d’un RTOS comprend
un noyau temps réel relié à un ordonnan-
ceur. Ce dernier définit l’ordre de traitement
des tâches en fonction de leur priorité. Un
algorithme préemptif s’exécute en parallèle
afin de vérifier à chaque temps de cycle
qu’une nouvelle interruption critique ne
s’est pas déclenchée. Par ailleurs, contraire-
ment à un système d’exploitation généra-
liste, un RTOS n’utilise qu’un seul espace
mémoire pour exécuter et sauvegarder
toutes les tâches (il n’y a pas de transferts de
données entre mémoire virtuelle et mémoire
physique).
Les RTOS se perfectionnent
Historiquement, les systèmes d’exploitation
temps réel ne traitaient les tâches qu’en
toutefois un grand intérêt. Le projet
“Preempt_RT” n’est plus considéré
aujourd’hui comme un projet annexe. Il fait
même partie des principaux projets. Un
grand nombre de développeurs de la com-
munauté Linux travaillent donc à améliorer
sa qualité et sa maturité.
Rajouter un cœur temps réel
L’approche “cœur temps réel” consiste
quant à elle à rajouter un noyau déterministe
à côté du noyau Linux classique. Le cœur
temps réel partage de la mémoire avec le
cœur Linux, et les deux communiquent par
le biais de files d’attente. Toutes les instruc-
tions sans exception passent par le noyau
temps réel. Ce dernier renvoie toutes les ins-
tructions non critiques vers le noyau Linux
standard et se charge d’exécuter les autres.
Mais il n’envoie les tâches non critiques au
noyau Linux standard qu’après avoir traité
les tâches prioritaires. Principale différence
avec le noyau préemptif : puisque les appli-
cations critiques sont directement chargées
dans le cœur temps réel, elles ont un accès
privilégié aux périphériques dont elles ont
besoin. Leur performance d’exécution est
donc moins sujette à variation qu’avec un
noyau préemptif.
Contrairement au noyau préemptif dont
l’installation est relativement transparente, le
principe du cœur temps réel induit des
différences avec le fonctionnement classique
de Linux, du fait du partage de la mémoire
entre les deux cœurs. Les développeurs
doivent donc s’appliquer à écrire des appli-
Lorsqu’il s’agit de certifier du code embarqué pour un secteur
critique (norme FDA 510k pour le médical, DO-178B pour
l’aéronautique, ou encore IEC 61508 pour les applications de
sécurité), il paraît bien difficile d’intégrer des solutions telles
que des OS Linux. Comment prouver la sûreté de fonctionnement
d’un OS comptant autant de lignes de codes, autant de modules
qui interagissent tous les uns avec les autres ? La certification
ne se limite pas seulement à livrer le code source du système
d’exploitation, il faut pouvoir en expliquer chaque détail.
En ce qui concerne Linux, il n’y a aucune visibilité sur les aspects
de qualité du code, de par le principe même de la communauté :
tout le monde peut rajouter des fonctions, mais à aucun moment
un document ne pourra attester de la validité du code. Pire :
on ne saurait même pas où s’adresser en cas de problème. Car
comme pour n’importe quel logiciel, un OS sans bug n’existe
pas. Le problème n’est pas que des bugs subsistent dans le code,
mais plutôt de savoir où ils sont situés et ce qu’ils font.
Pour les applications critiques, il faut absolument éviter qu’un OS
ne plante sans crier gare ou ne mette le système dans un état
instable. Il est donc impératif d’oublier la notion d’Open Source et
de s’orienter vers les solutions certifiables proposées par certains
éditeurs. Ces OS peuvent être fournis avec des documents
de vérification et de validation, voire même avec des outils de
couverture de tests propres à une norme.
Toutefois, il reste possible d’intégrer un OS Linux à l’intérieur
d’une application critique en faisant appel à la virtualisation
(voir article Mesures n° 810, page 35). Rappelons que
la virtualisation consiste à faire tourner plusieurs OS ou applications
sur un seul et même système, en leur faisant croire qu’ils
s’exécutent sur des systèmes physiquement différents. Une fois
la plate-forme de virtualisation installée (entre la couche
matérielle et l’OS), Linux peut tourner en parallèle de Windows,
d’un RTOS ou même d’applications Java, Ada, etc. De plus,
les outils de virtualisation sont tous légers, ce qui facilite leur
certification (car ce sont eux les garants de la sûreté de fonction-
nement du système). A noter bien sûr que ces deux dernières
solutions ont un coût non négligeable. Que l’on opte pour
une solution Linux propriétaire ou pour un hyperviseur, on
s’éloigne fortement du modèle “gratuit” des OS Linux. Et il reste
encore à programmer et à certifier l’application proprement dite.
Linux n’est pas adapté aux applications certifiées
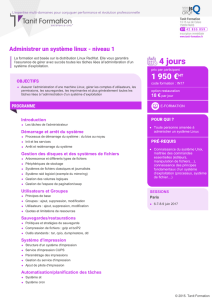
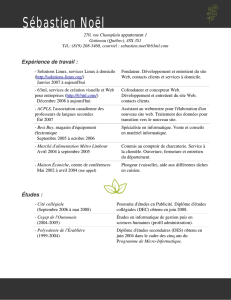
Architecture
Linux standard
Linux +
cœur temps réel
Architecture optimisée avec mode kernel
et mode utilisateur
Comme tous les systèmes d’exploitation généralistes, Linux
standard forme une couche d’abstraction au-dessus du matériel.
Le c
œ
ur temps réel prend complètement la main sur le système. Il traite
directement les tâches critiques et envoie toutes les autres au noyau Linux.
Les architectures les plus récentes placent une couche d’abstraction au-dessus du c
œ
ur temps réel. Ceci afin
de pouvoir développer des applications sans forcément maîtriser les langages de bas niveau.
➜
➜

MESURES 818 - OCTOBRE 2009 - www.mesures.com
34
S
olutions
ment rapide et véritablement déterministe
de certaines interruptions. Les autres tâches,
non prioritaires, sont traitées par le noyau
Linux comme des processus classiques. Cette
méthode présente l’avantage de la séparation
de la mémoire. En revanche, ces solutions
sont propriétaires.
A l’inverse, dans un RTOS, véritable outil
industriel, tout est pensé dans le sens des
performances temps réel. Dans le secteur de
l’électronique embarquée, la quantité de
mémoire est toujours dimensionnée au plus
juste. L’empreinte mémoire de l’OS joue
donc également un rôle dans le choix entre
un OS Linux et un RTOS qui occupera moins
d’espace qu’un Linux avec cœur temps réel.
Ajoutons à cela que les RTOS bénéficient
pour la plupart de dizaines d’années d’utili-
sation, durant lesquelles ils ont été améliorés
et optimisés par leurs éditeurs.
A l’inverse, Linux, bien que supporté par une
communauté, manque encore de maturité
pour l’embarqué. Sans compter que les RTOS
sont plus facilement certifiables pour les
applications militaires et aéronautiques, qui
doivent répondre à des normes très strictes.
La taille du système d’exploitation Linux,
inadaptée au monde de l’embarqué, le rend
plus difficile et surtout plus coûteux à
certifier.
Le choix entre Linux et RTOS revient donc
en quelque sorte à déterminer si une appli-
cation est plutôt orientée “tâches critiques”
ou “tâches annexes” (affichage, calcul sur
des données, sauvegardes, etc.). Il faut
trouver un compromis entre les deux critères
principaux que sont l’indépendance que
l’on souhaite conserver entre les différentes
tâches d’une application, et les besoins en
communication entre ces tâches.
Restent quelques aspects à prendre en
considération avant d’arrêter son choix entre
un RTOS et Linux temps réel, tels que la dis-
ponibilité des logiciels tiers utiles à l’appli-
cation. Si des logiciels génériques sont
nécessaires, on optera plus volontiers pour
Linux. Autre point délicat : les coûts globaux
de maintenance et de mise à jour, qui ne sont
pas clairement identifiables avec les logiciels
libres. L’amortissement d’une solution
propriétaire sera donc plus facile à calculer.
Et enfin, il faut bien sûr s’assurer de la
disponibilité d’une solution Linux ou RTOS
pour la plate-forme matérielle considérée.
Frédéric Parisot
d’après Hans Juergen Rauscher,
architecte système chez Wind River
On mesure le déterminisme d’un système d’exploitation par son temps de réponse à une
interruption, aussi appelé “temps de latence”. Il s’agit du temps que met le noyau du système
d’exploitation avant de répondre à un évènement. Cela inclut le temps de sauvegarder la tâche
en cours, de déterminer la provenance de l’interruption et d’effectuer le traitement proprement
dit. Rappelons qu’un système d’exploitation contient un tableau de fonctions, appelé “handler
d’interruptions”, qui associe à chaque interruption ou séquence d’interruptions une action
à effectuer. Mais avec la plupart des applications temps réel, avant que le système ne réponde
à une interruption, il lui faut juger de l’importance de cette dernière et la comparer avec les
traitements déjà en cours. C’est pourquoi l’on a besoin d’une gestion des priorités entre les tâches.
Le fait d’effectuer ce contrôle de priorité avant de traiter une tâche induit forcément des temps
de latence supplémentaires. Il y a surtout le temps nécessaire pour identifier le niveau de priorité.
C’est le même principe que l’on retrouve dans un commutateur Ethernet, qui doit analyser l’entête
de la trame avant de la traiter. A cela s’ajoutent forcément le temps de la comparaison entre
les deux degrés de priorité, celui de la tâche en cours et celui de la tâche en attente. La latence totale
d’un système est donc la somme de ces trois temps : le temps d’identification du niveau de
priorité, le temps de comparaison avec la tâche en cours et le temps de traitement de l’interruption.
Quelques notions de temps réel
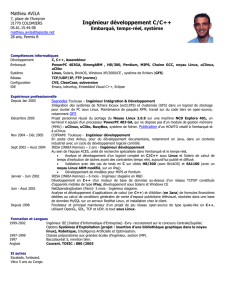
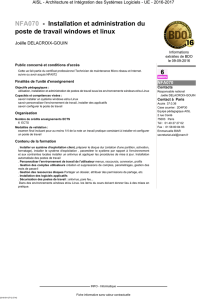
Avec la méthode du noyau préemptif, une certaine variabilité subsiste dans les temps de latence.
Une bonne illustration de ce que l’on appelle le temps réel mou.
A l’inverse, la méthode du c
œ
ur temps réel présente à la fois un seuil minimum très bas
pour les temps de réponse et une faible variabilité. On peut alors parler de temps réel dur.
➜
1
/
3
100%