etude d`un onduleur de

Page 1 sur 9
L’ONDULEUR AUTONOME
Définition :
Un onduleur est un convertisseur statique continu – alternatif. L’onduleur est dit
autonome quand il impose sa propre fréquence à la charge (ce qui est différent de l’onduleur
assisté où la fréquence est imposée par la fréquence du réseau) .
Les onduleurs autonomes sont utilisés :
• pour alimenter des moteurs synchrones ou asynchrones pour faire varier la
vitesse ;
• comme alimentations de secours ;
• comme alimentation de dispositifs de chauffage par induction (les fréquences
des courants fournis par ces onduleurs sont comprises entre quelques dizaines
de hertz à quelques centaines de hertz) .
Principe de fonctionnement :
Charge
E
E
k
1
k
2
u
i
Commande symétrique
:
• Pour
2
T
t0 <≤
l’interrupteur
électronique k1 est fermé, k2 est
ouvert et u = E.
• Pour
Tt
2
T<≤
l’interrupteur
électronique k2 est fermé, k1 est
ouvert et
u =
-
E
.
E
-
E
T/2
T
t
u
Co
mmande décalée
:
La tension u peut prendre 3
valeurs :
• Pour k1 est fermé ; u = E.
• u = 0.
• Pour k2 est fermé, u = -
E.
E
-
E
T/2
T
t
u
k
1
k
2
k
2
k
1
0
0
Page 2 sur 9
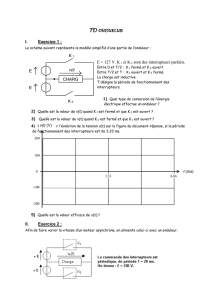
Etude d’un onduleur de tension autonome monophasé :
Schéma de principe :
Le générateur 2E est une alimentation stabilisée 0-30V réglée à 30V. Cette
alimentation n’est pas réversible (c’est-à-dire qu’il ne peut y avoir de courant entrant) d’où
d’adjonction de condensateurs qui, eux peuvent emmagasiner temporairement une quantité
d’électricité.
Les transistors T1 et T2 sont deux transistors complémentaires NPN et PNP qui
fonctionnent en régime de saturation (bloqué-saturé) qui peuvent être commandés soit par un
générateur de fonctions soit à partir d’un montage à amplificateur .
De
2
T
t0 <≤
; c’est l’élément H1 qui est commandé.
De
Tt
2
T<≤
; c’est l’élément H2 qui est commandé.
Très souvent, la charge alimentée par l’onduleur est de nature inductive ce qui
implique que l’allure du courant i(t) est différente de celle de la tension u(t).
Pour
1
tt0
<
≤
, u = E et i < 0, c’est le condensateur C qui fournit de l’énergie et le
courant circule dans le sens inverse que celui représenté sur le schéma. Comme les
interrupteurs électroniques sont en général unidirectionnel, pour permettre au courant de
circuler, on place une diode (D1) en parallèle (montage dit antiparallèle); c’est une phase de
récupération.
Les diodes D1 et D2 sont des diodes de récupération.
E
-
E
T/2
T
t
u
i
t
1
E
E
i
D1
i
v
BB
CHARGE
R
B
R
B
T
1
D
1
T
2
D
2
i
E1
i
T1
i
B1
2E
C
+
C
+
H
1
H
2
u

Page 3 sur 9
Manipulation :
La charge est une charge R =100 Ω
ΩΩ
Ω et L = 0,5 H et f = 50 Hz.
Visualiser les différentes formes des courants et tensions.
Mesurer E et <E> en précisant quelle doit-être la position de l’appareil.
Supprimer la résistance R et observer que l’intensité i(t) du courant dans la charge est
presque triangulaire. Démontrer par le calcul l’allure visualisée.
La charge est une charge R =100 Ω
ΩΩ
Ω , L = 0,5 H , f0 = 400 Hz C est à déterminer.
Faire varier sensiblement la fréquence f délivrer par le GBF et observer ce qui se passe
pour le maximum de i.
Lorsque la charge est composée de R, L et C en série, la fréquence de résonance est
donnée par la formule
CL2 1
f
0
0
π
=.
Relever U et I.
Page 4 sur 9
L’onduleur en pont à quatre interrupteurs électroniques :
Montage :
Le montage pratique nécessite quatre interrupteurs. Il présente l’avantage de pouvoir
être alimenté par une source de tension continue fixe ou variable sans point milieu. Les diodes
D
1
, D
2
, D
3
et D
4
sont des diodes de récupération.
Contrairement au montage à deux interrupteurs, un tels montage permet d’utiliser soit
une commande symétrique
soit
une commande décalée
.
Commande symétrique :
Les interrupteurs H sont commandés périodiquement et deux par deux ( H
1
en même
temps que H
3
; H
2
en même temps que H
4
). (Compléter les oscillogrammes de l’annexe 1).
•
Pour 2
T
t0 <≤ , H
1
et H
3
sont fermés, H
2
et H
4
sont ouverts.
•
Pour Tt
2
T<≤ , H
2
et H
4
sont fermés, H
1
et H
3
sont ouverts.
H
1
D
1
H
2
D
2
H
4
D
4
H
3
D
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
u = …..
De 0 à t
1
, ce sont …. et …. qui
conduisent
.
i … 0 ; et p = u.i …. 0 ; c’est une …………
De t
1
à T/2, ce sont …. et …. qui
conduisent
.
i … 0 ; et p = u.i …. 0
; c’est la source
…………
u = …..
De T/2 à t
2
, ce sont …. et …. qui
conduisent
.
i … 0 ; et p = u.i …. 0 ; c’est une …………
De t
2
à T, ce sont …. et …. qui
conduisent
.
i … 0 ; et p = u.i …. 0 ; c’est la
source
…………

Page 5 sur 9
Commande décalée :
Principe de la commande décalée :
Pour obtenir la tension de la page 1 :
•
H
1
est fermé lorsque H
2
est ouvert et inversement ; il en est de même pour H
3
et H
4
.
•
Les actions de commande portant sur H
1
sont décalées par rapport à celles qui
concernent H
3
. De même la commande de H
2
est décalée par rapport à celle de
H
4
.
Compléter les schémas ci dessous ainsi que les oscillogrammes de l’annexe 2.
•
Pour
1
tt0
<
≤
:
•
Pour
21
ttt
<
≤
:
•
Pour 2
T
tt
2
<≤ :
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
u = …….
Eléments commandés : ………….
Eléments passants : …………….
u = …….
Eléments commandés : ………….
Eléments passants : …………….
u = …….
Eléments commandés : ………….
Eléments passants : …………….
Page 6 sur 9
•
Pour
3
tt
2
T<≤ :
•
Pour
43
ttt
<
≤
:
•
Pour Ttt
4
<
≤
:
Relations à déterminer :
Donner l’expression de <u> :
Donner l’expression littérale de U en fonction de E et t
2
.
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
D
1
H
1
D
4
H
4
D
2
H
2
D
3
H
3
E
u
i
u = …….
Eléments commandés : ………….
Eléments passants : …………….
u = …….
Eléments commandés : ………….
Eléments passants : …………….
u = …….
Eléments commandés : ………….
Eléments passants : …………….

Page 7 sur 9
u( )t
i( )t
t
u( )t
i( )t
i( )t
t
u( )t
i( )t
i( )t
t
u( )t
i( )t
i( )t
t
T/2
T
t
1
t
2
u(t)
i(t)
0
u
H1 ;
u
H3
i
H1 ;
i
H3
i
D1 ;
i
D3
i
G
Eléments passants
Eléments commandés
Signe de l
a puissance p = ui
ANNEXE 1
Page 8 sur 9
Allure de la tension u(t) et i(t) ; on suppose que i est en retard par rapport à u.
ANNEXE 2
0 0 . 0 0 5 0 . 0 1 0 . 0 1 5 0 . 0 2 0 . 0 2 5
0 . 0 3
4 0
0
4 0
u( )t
i( )t
t
Eléments passants
Eléments commandés
0
t
1
t
2
t
3
t
4
T/2
T
0
t
1
t
2
t
3
t
4
T/2
T
ANNEXE 3

Page 9 sur 9
Intérêt et application de l’onduleur à commande décalée :
Les onduleurs sont particulièrement utilisés pour alimenter des moteurs asynchrones
dont la vitesse de rotation doit pouvoir être réglée.
Pour un moteur asynchrone, le valeur efficace de la f.é.m. induite dans un enroulement
est V = KfNΦ.
La fréquence de rotation n = n
s
(1 – g) = )g1(
p
f−. Ainsi, pour faire varier la vitesse
d’un moteur asynchrone, il suffit de faire varier la fréquence f de la tension d’alimentation du
stator.
De plus, pour obtenir un couple électromagnétique maximal, il faut obtenir un flux
Φ maximal soit f
V
.
KN
1
=Φ . Il faut donc alimenter le moteur en maintenant le rapport
constante
f
V
=
.
En T.P., nous avons vu lorsque la charge est inductive, le courant n’est pas sinusoïdal
car la tension u est en créneau. Ceci entraîne la création d’harmoniques de fréquences
2f, 3f, … non désirables car elles perturbent le bon fonctionnement des machines (moteurs en
particulier). Pour réduire ces harmoniques en nombres et en intensité, on utilise des onduleurs
à modulation de largeur d’impulsion (
M.L.I.)
.
1
/
5
100%