Une concentration de performances.

11
Une concentration de performances.
UT 20-S150 – Les nouveaux ultrasons avec Soundpipe
Capteurs capacitifs Capteurs optiques Capteurs ultrasoniques Détecteurs inductifs Capteurs de vision

2www.sensopart.com
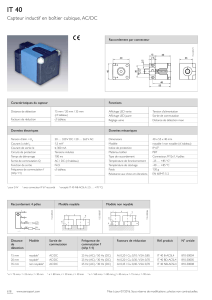
Comme capteur de proximité
Le mode d‘utilisation classique emploie une fonction supérieure
aux autres : la suppression d‘arrière-plan. La sortie de commu-
tation est alors activée quand l‘objet se trouve en deçà de la
distance de commutation établie. Le point de commutation est
affecté d‘une hystérésis. Ce mode d‘utilisation est approprié, par
exemple, pour reconnaître des objets sur un tapis roulant ou
pour effectuer des contrôles de présence.
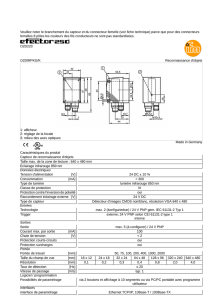
Capteurs ultrasoniques à sortie analogique
Dans ce type de modèles, une tension (0…10 V) ou un courant
(4…20 mA) est émis proportionnellement à la distance avec
l‘objet. On peut fixer les valeurs limites et choisir entre caractéris-
tique ascendante ou descendante.
Capteurs ultrasoniques
Descriptif
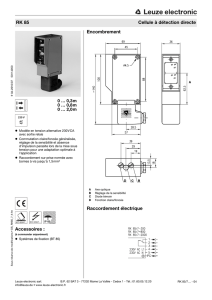
En mode fenêtre
La sortie de commutation n‘est activée que lorsque l‘objet se
trouve à l‘intérieur d‘une fenêtre définie par deux valeurs limites.
On peut ainsi contrôler que les bouteilles contenues dans une
caisse sont à la bonne taille puisque les bouteilles trop grandes
ou trop petites sont détectées.
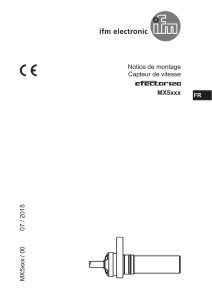
Comme barrière à réexion à deux voies
On peut utiliser le capteur ultrasonique comme barrière optique :
il n‘est pas nécessaire d‘utiliser un réflecteur spécial puisqu‘un simple
morceau de métal suffit. On configure le capteur en mode fenêtre
de telle sorte que le réflecteur se trouve dans la fenêtre. La bar-
rière à réflexion ultrasonique émet un signal dès qu‘un objet obs-
true le réflecteur ; peu importe alors que l‘objet absorbe com-
plètement le son ou qu‘il le réfléchisse. Ce mode d‘utilisation est
employé pour des matériaux difficilement reconnaissables avec une
surface irrégulière comme la mousse par exemple.
Fonctionnement
Les capteurs de proximité ultrasoniques fonctionnent sur la base
de la mesure du temps de propagation de l‘écho. Quand les im-
pulsions ultrasoniques émises par le capteur atteignent un objet,
elles sont réfléchies par ce dernier. Le capteur mesure alors la
distance en calculant le temps écoulé entre l‘envoi de l‘impulsion
ultrasonique et la réception de l‘écho.
En fonction de l‘amplificateur, la distance mesurée est soit trans-
formée en un signal électrique ou de tension proportionnel
à la distance (capteur analogique), soit la sortie de commutation
est activée par rapport au point de commutation établi.
Applications
a) Sortie de commutation activée
b) Sortie de commutation
non activée
c) Distance de détection réglée
a) Sortie de commutation
non activée
b) Sortie de commutation activée
c) Sortie de commutation
non activée
d) Fenêtre de commutation réglée
a)* Sortie de commutation
activée
b) Fenêtre réglée
c) Réflecteur
* Pas d‘objet = sortie de
commutation non activée
a) Sortie linéaire
b) Fenêtre analogique réglée
Werkstoff
Zust. Änderung Datum Name
Bearb.
Gepr.
Datum Name
Alle gesetzlichen Urheber-Rechte
vorbehalten. Diese Zeichnung darf
ohne unsere Genehmigung weder
vervielfältigt noch dritten Personen
und Konkurrenzfirmen zugängig
gemacht werden.
Maßstab
Benennung
Teilenummer Blatt
v. Bl.
a) b)
c)
Werkstoff
Zust. Änderung Datum Name
Bearb.
Gepr.
Datum Name
Alle gesetzlichen Urheber-Rechte
vorbehalten. Diese Zeichnung darf
ohne unsere Genehmigung weder
vervielfältigt noch dritten Personen
und Konkurrenzfirmen zugängig
gemacht werden.
Maßstab
Benennung
Teilenummer Blatt
v. Bl.
a) b) c)
d)
Werkstoff
Zust. Änderung Datum Name
Bearb.
Gepr.
Datum Name
Alle gesetzlichen Urheber-Rechte
vorbehalten. Diese Zeichnung darf
ohne unsere Genehmigung weder
vervielfältigt noch dritten Personen
und Konkurrenzfirmen zugängig
gemacht werden.
Maßstab
Benennung
Teilenummer Blatt
v. Bl.
a) *
b)
c)
Werkstoff
Zust. Änderung Datum Name
Bearb.
Gepr.
Datum Name
Alle gesetzlichen Urheber-Rechte
vorbehalten. Diese Zeichnung darf
ohne unsere Genehmigung weder
vervielfältigt noch dritten Personen
und Konkurrenzfirmen zugängig
gemacht werden.
Maßstab
Benennung
Teilenummer Blatt
v. Bl.
4 mA 20 mA
a)
b)

3
www.sensopart.com
Les capteurs ultrasoniques peuvent être montés et utilisés dans
n‘importe quelle position. Toutefois, le capteur ne doit pas être
monté dans une position favorisant son encrassement puisque
les gouttes d‘eau et les salissures peuvent entraver son bon fonc-
tionnement. En règle générale, de fines couches de poussière et
des éclaboussures de peinture n‘ont aucune incidence.
Si les capteurs doivent être utilisés pour la reconnaissance de
surfaces lisses, ils doivent être montés, dans la mesure du pos-
sible, à la verticale, c‘est-à-dire dans un angle de 87° à 93° par
rapport à la surface.
Des écarts d‘angle largement supérieurs sont néanmoins pos-
sibles pour les surfaces rugueuses. On considère qu‘une surface
est rugueuse si la profondeur de rugosité est plus grande que la
longueur d‘onde de la fréquence ultrason. Le son est toutefois
réfléchi de manière diffuse, ce qui peut entraîner une réduction
de la distance de travail. Dans ce cas, l‘écart d‘angle maximal
toléré et la distance de travail maximale doivent être déterminés
au cours d‘essais.
Les matériaux absorbant facilement les sons (comme par ex.
le coton et la mousse synthétique) peuvent encore réduire la
distance de travail ; les liquides et les matériaux solides sont,
quant à eux, très réfléchissants.
Montage
a) b)
>> ±3°≤ ±3°
Le tableau suivant indique les distances minimales à respecter
entre des capteurs non synchronisés. Les capteurs peuvent
s‘influencer mutuellement dans le cas de distances inférieures
à ces valeurs.
Il ne s‘agit, pour les distances de montage indiquées, que de
valeurs indicatives. En cas d‘inclinaison, le son peut également
être ‹ réfléchi › sur le capteur voisin. La distance minimale doit
être calculée au cours d‘essais. Certains capteurs permettent
la synchronisation entre eux et, par conséquent, des distances
de travail nettement moins importantes.
Distances de montage
a)
≥ 0.35 m
0.25 m
0.35 m
1.30 m
3.40 m
6.00 m
≥ 0.40 m
≥ 1.10 m
≥ 2.00 m
≥ 4.00 m ≥ 30.00 m
≥ 18.00 m
≥ 8.00 m
≥ 2.50 m
≥ 2.50 m
a) Lisse
b) Rugueux
a) Distance de détection

4www.sensopart.com
Caractéristiques du capteur Fonctions
Distance de détection maxi
Distance de travail
Fréquence du transducteur
Résolution
Reproductibilité
Hystérésis
Dérive en température
250 mm
20 … 140 mm
~ 380 kHz
0,20 mm
± 0,15 %1
2 mm
0,17 % / °C
Affichage LED verte
Affichage LED jaune
Réglage de la distance de détection
Modes teach-in
Possibilités de réglage
Réglage usine
Tension d‘alimentation
Sortie de commutation
Par touche teach-in
Mode 1: Point de commutation
Mode 2: Fenêtre
Mode 3: Barrière à réflexion à deux
voies
N.O. / N.C. par touche teach-in
Verrouillage touche(s) par touche
teach-in
Synchronisation par entrée de contrôle
Réglage usine par touche teach-in
Sensibilité max. et N.O.
Données électriques Données mécaniques
Tension d‘alimentation +UB
Courant à vide I0
Courant de sortie Ie
Circuits de protection
Protection électrique
Temps d’initialisation
Sortie de commutation Q
Fonction de commutation
Fréquence de commutation f
(ti/tp 1:1)
Temps de réaction
Raccordement WH
20 … 30 V DC2
≤ 25 mA
200 mA
Protection contre inversion de polarité UB /
Protection contre courts-circuits (Q)
2
< 300 ms
PNP / NPN (cf. tableau de sélection)
N.O. / N.C.
25 Hz
24 ms
Sync.
Dimensions
Indice de Protection
Matériau du boîtier
Matériau transducteur
ultrasonique
Raccordement
Température ambiante:
fonctionnement
Température ambiante: stockage
Poids
Résistance aux chocs et vibrations
32 x 38,5 x 12 mm
IP 673
ABS
Mousse de polyuréthane, Résine époxy
chargée de fibre de verre
(cf. tableau de sélection)
-25 … +70 °C
-40 … +85 °C
10 g
EN 60947-5-2
1 de la valeur finale de la distance de détection maxi 2 ondulation résiduelle 10 % max., à l‘intérieur de UB 3 avec connecteur IP 67 connecté
UT 20-S150-P/N
Capteur ultrasonique avec focalisateur
POINTS FORTS DU PRODUIT
• Idéal pour le contrôle de niveau, notamment dans de
petits contenants
• Lobe ultrasonique étroit pour une détection précise même
à travers des ouvertures et alésages de petite taille
• Détection fiable d‘objets hautement transparents
• Détection indépendante de la couleur ou de la surface
de l’objet
• Format miniature compact pour une utilisation dans des
espaces exigus
Distance de travail Sortie de commutation Type de raccordement Référence de commande N° article
20 … 140 mm
20 … 140 mm
PNP
NPN
Connecteur en métal, M8x1, 4 pôles
Connecteur en métal, M8x1, 4 pôles
UT 20-S150-PSM4
UT 20-S150-NSM4
693-11012
693-11013

5
www.sensopart.com
Raccordement connecteur
153-00982
Lobe ultrasonique Synchronisation / Déclenchement par trigger
155-01528 155-00131
0 mm
20 mm
40 mm
20 mm
40 mm
260 mm
20 mm
40 mm
60 mm
80 mm
100 mm
120 mm
140 mm
160 mm
180 mm
200 mm
220 mm
240 mm
sensor inactive sensor inactive
start measurement
t > 150 µs 8 ms < tp < 1 s
+UB
-UB
Raccordement 4 pôles
154-00116
PNP
NPN
1 BN
2 WH
4 BK
3 BU
+UB
-UB
3
OUT
SYNC
Appliquer un signal rectangulaire sur l’entrée de synchronisation.
Largeur de pulsation t > 150 μs, taux de reproductibilité tp = 8 ms … 1 s.
Un niveau High +UB sur l‘entrée de synchronisation désactive le capteur.
 6
7
8
6
7
8
1
/
8
100%