Composants semi-conducteurs pour les hyperfrequences

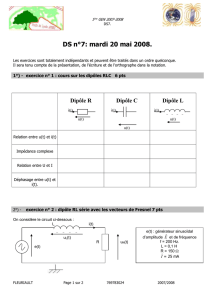
Chapitre 1
Les dipôles hyperfréquences
Les dipôles semi-conducteurs ont joué un rôle historique majeur dans le
développement des systèmes hyperfréquences à l’état solide. Ils ont ainsi fait l’objet de
travaux de recherche intenses dès les années 50. Ceux-ci ont conduit au
développement de structures spécifiques entrant dans la réalisation de la plupart des
fonctions de base des dispositifs. Si les dipôles semi-conducteurs ont dans un premier
temps remplacé les tubes à vide partout où cela était possible, la tendance générale
actuelle est d’être à leur tour remplacés par des tripôles et plus précisément par des
transistors hyperfréquences. On peut attribuer le déclin progressif, depuis les années
80, de l’utilisation des dipôles micro-ondes à plusieurs facteurs. En premier lieu,
l’électrode de commande qu’est classiquement la grille ou la base d’un transistor,
constitue, en comparaison avec un composant ne comportant que deux électrodes, un
avantage fondamental en terme de souplesse d’utilisation. D’autre part, la structure
planaire des transistors est naturellement compatible avec l’intégration monolithique
des circuits rendue nécessaire par l’augmentation de la complexité des fonctions de
l’électronique à réaliser tant analogiques que numériques pour la production de masse
dans les applications civiles. Les dipôles, quant à eux, présentent en général une
structure verticale de type mésa rendant l’intégration monolithique beaucoup plus
difficile. De plus, peu des dipôles classiques ont su tirer parti de l’avènement des
hétérostructures alors que celui-ci a permis le développement à partir des années 80 de
nouvelles filières de transistors comme le transistor à effet de champ à haute mobilité
(HEMT) et le transistor bipolaire à hétérojonction (HBT) dont les apparitions
successives ont permis un bond technologique décisif pour la montée en puissance et
en fréquence des systèmes. Les dipôles souffrent encore de désavantages résultant de
leur fonctionnement dynamique, souvent intrinsèquement non linéaire et dépendant de
Chapitre rédigé par Christophe DALLE.

Semi-conducteurs pour les hyperfréquences
16
la température, et à leur forte interaction avec le circuit extérieur. En conséquence, la
modélisation, l’optimisation et la mise en œuvre de circuits à dipôles s’avèrent souvent
délicates, en particulier à cause de la difficulté dans la définition de schémas
électriques équivalents à la fois réalistes et compatibles avec une exploitation dans les
logiciels de conception assistée par ordinateur utilisés systématiquement dans
l’industrie. Les dipôles hyperfréquences conservent cependant un rôle important dans
les applications hautes fréquences et dans celles dans lesquelles des niveaux de
puissance élevés sont mis en jeu et là où la performance pure prime sur le coût comme
dans les applications militaires, les dispositifs de mesure et les circuits pour
applications spécifiques. Nous focaliserons notre exposé sur les structures encore
d’actualité comme les dipôles à temps de transit pour la génération de puissance à
savoir la diode à avalanche et temps de transit et la diode à transfert électronique, les
diodes PIN et Varactor pour les applications de contrôle et de génération harmonique
de puissance.
Dans ce chapitre, nous décrirons la structure spécifique de chacun de ces dipôles
hyperfréquences. Leur principe de fonctionnement sera étudié à l’aide d’une
modélisation physique temporelle basée sur une approche macroscopique
unidimensionnelle justifiée par la géométrie de la puce semi-conductrice en général de
type mésa. Cette méthode nous permettra de décrire les formes d’ondes des signaux
électriques externes aux composants (courant et tension) en relation avec les
évolutions spatio-temporelles des principales grandeurs physiques internes (densité et
vitesse des électrons et des trous, champ électrique, etc.) déterminées par les
phénomènes physiques et les conditions de transport des porteurs mobiles au sein de
leur zone active. Ceci nous permettra de bien comprendre l’origine de leurs
performances mais aussi celle de leurs limites de fonctionnement. Enfin, leurs
principales applications seront chaque fois présentées.
1.1. Oscillateurs micro-ondes à dipôle à temps de transit
1.1.1. Principe de fonctionnement des oscillateurs micro-ondes à dipôle à temps de
transit
Un oscillateur électrique sinusoïdal à l’état solide est un dispositif électronique
permettant la conversion d’une puissance continue d’alimentation P0 en une puissance
P1 alternative à une fréquence ω déterminée. Ainsi, un oscillateur à dipôle à temps de
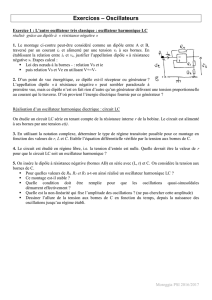
transit peut être schématiquement représenté par un dispositif comprenant (figure 1.1) :
– un circuit de polarisation continue fournissant la puissance d’alimentation P0,
– un élément électronique actif à savoir un dipôle à injection et temps de transit. Ce
type de composant semi-conducteur est, sous certaines conditions de polarisation
continue, capable de convertir une partie de la puissance continue qui lui est fournie en
puissance hyperfréquence P1 dans une certaine bande de fréquence,

Les dipôles hyperfréquences
17
– un circuit passif de charge dont le rôle est la stabilisation du fonctionnement de
l’oscillateur à la fréquence ω désirée et le transfert optimal de la puissance émise par
l’élément actif vers la charge utile à l’utilisateur.
Figure 1.1. Schéma de principe d’un oscillateur à temps de transit
L’interaction entre les propriétés dynamiques intrinsèques de l’élément actif et le
comportement électrique fréquentiel du circuit passif de charge détermine le
fonctionnement instantané global de l’oscillateur et donc ses performances utiles.
1.1.1.1. Condition d’oscillations monochromatiques
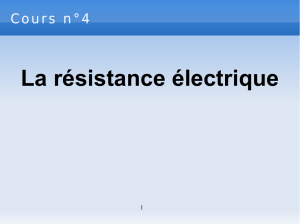
Figure 1.2. Modèle fréquentiel de l’oscillateur à résistance négative
en régime continu d’oscillations à une fréquence ω
En régime de fonctionnement permanent, la décomposition en série de Fourier sur
une période à la fréquence ω de la tension instantanée V(t) développée aux bornes du
dipôle et du courant I(t) le parcourant permet de définir le modèle fréquentiel de
l’oscillateur (figure 1.2). Celui-ci exprime clairement la condition d’oscillations à la
fréquence ω en terme de relation d’impédances et permet le calcul des grandeurs
fonctionnelles associées (puissance P1 et rendement). Le problème posé au concepteur
d’un oscillateur est en général l’obtention d’une puissance alternative P1=V1I1cosφ1 à
la fréquence fondamentale ω désirée à la fois monochromatique et maximale, associée

Semi-conducteurs pour les hyperfréquences
18
à un rendement de conversion P1/P0 le plus élevé possible [1]. Ainsi, l’obtention d’une
puissance de sortie P1 monochromatique est possible si au moins l’un des deux
signaux électriques mesurables aux bornes du circuit de charge, c'est-à-dire la tension
V(t) développée à ses bornes ou le courant I(t) le parcourant, est un signal sinusoïdal
pur. En effet, la puissance étant proportionnelle au produit courant-tension, il suffit que
l’un de ces deux signaux soit purement sinusoïdal pour que la puissance recueillie dans
le circuit de charge soit monochromatique. Cette fonction peut être assurée par la
fonction de filtrage et d’adaptation d’impédance du circuit passif de charge. Ainsi,
l’obtention d’une tension alternative monochromatique aux bornes du circuit de charge
nécessite que celui-ci se comporte d’un point de vue électrique comme un court-circuit
à toutes les fréquences autres que la fréquence d’oscillations ω désirée. Ce cas idéal
peut être approché en pratique par l’utilisation d’un circuit résonnant RLC parallèle à
coefficient de surtension Q suffisamment élevé. Dans ce cas, on peut admettre en
première approximation que la forme d’onde de la tension développée aux bornes du
dipôle actif est de la forme :
V(t) = V0 + V1sin(ωt).
L’évolution temporelle du courant I(t) est quant à elle déterminée par les propriétés
dynamiques du dipôle actif.
De façon duale, l’obtention d’un courant parfaitement sinusoïdal à la fréquence ω
implique que le circuit de charge se comporte comme un circuit ouvert à toutes
fréquences autres que la fréquence d’oscillations. Ce cas idéal peut être approché en
pratique par l’utilisation d’un circuit résonnant RLC série présentant un coefficient de
surtension suffisamment élevé. Le courant circulant dans le circuit de charge est alors
de la forme :
I(t) = I0 + I1sin(ωt).
L’évolution temporelle de la tension V(t) développée aux bornes du circuit de
charge est déterminée par les propriétés électriques dynamiques du dipôle actif.
1.1.1.2. Modèle simplifié de l’oscillateur à dipôle à temps de transit
Les circuits passifs les plus couramment utilisés en hyperfréquences pour la
réalisation d’oscillateurs à temps de transit sont principalement des cavités en structure
guide d’onde métallique. Ces circuits présentent un comportement électrique
fréquentiel proche de celui d’un circuit résonnant parallèle à coefficient de surtension
élevé. Cette propriété permet de réduire le modèle de l’oscillateur à dipôle à temps de
transit à un modèle temporel du dipôle actif capable de déterminer la relation
instantanée entre le courant I(t) parcourant le composant et la tension V(t) développée
à ses bornes dont la forme d’onde est dans ce cas à priori purement sinusoïdale. Pour
un point de polarisation continue fixé, le modèle du composant fournit l’évolution du

Les dipôles hyperfréquences
19
courant I(t) en régime permanent. La décomposition en série de Fourier sur un cycle, à
la fréquence d’oscillation ω imposée, de ces signaux électriques permet le calcul de la
puissance hyperfréquence directement émise par le composant actif, le rendement de
conversion associé ainsi que son impédance [2]. Les résultats obtenus n’ont cependant
un sens que si la condition d’oscillations théorique peut être reproduite en pratique.
Ceci signifie notamment que le niveau d’impédance de charge à réaliser pour adapter
l’impédance présentée par le composant doit être compatible avec la technologie des
circuits passifs hyperfréquences utilisée.
1.1.1.3. Influence de la forme d’onde du courant I(t) sur les performances de l’oscillateur
Aucune hypothèse n’a jusqu’à présent été formulée concernant l’influence de la
forme d’onde du courant I(t) délivré par l’élément actif sur les performances globales
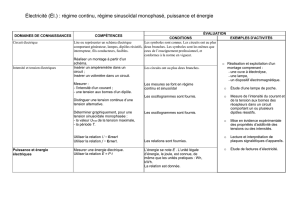
de l’oscillateur. On peut donc se permettre d’étudier à priori les formes d’onde de ce
courant conduisant aux performances les plus élevées (figure 1.3).
Figure 1.3. Formes d’onde théoriques idéales de la tension et du courant dans un oscillateur
à dipôle pour différents modes de fonctionnement sinusoïdal permanent :
a) classe C idéal, b) résistance dynamique négative pure, c) à temps de transit
1
/
5
100%