2011 : Projet ERS3-4 Vélo à assistance électrique/Scooter électrique

Labor
P.LAURENTPage103/11/2011
InstitutUniversitaire
DeTechnologie
Nice–Côted’Azur
2011:ProjetERS3‐4Véloàassistanceélectrique/Scooterélectrique
1. Objectifs :
L’idéeestderéaliseruneétudedelacommandeetdufonctionnementd’unvéloàassistanceélectrique.
Cetteétudecomprendral’analysedufonctionnementd’unvéloàassistanceélectriqueetdesesconstituants
• Laprogrammationd’unPLDAlterapourréaliserlacommandeducollecteurélectroniquedumoteurdeVAE
• LaprogrammationenCd’unmicrocontrôleurBeckquiagiracommesuperviseur
• Lamiseenplaced’unécranindicateurLCDdéportépourlaffichagedesparamètresinstantanésdu
contrôleurdeVAE(vitesse,%assistance,jaugeénergie,températureconvertisseur
2. Etude fonctionnelle d’un Vélo à Assistance Electrique.
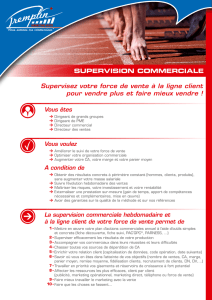
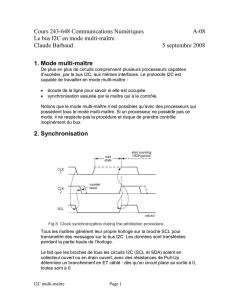
2.1. Schémafonctionneld’unVAE:
Batterie
Pb ou LiOn
36V ou 48V
Calculateur
VAE
Moteur
brushless
Convertisseur
de
puissance
(onduleur tri)
3
Capteurs Hall de position
Mesure Courant
Ph
A
PhB
PhC
+Vbat
Capteur Pédalage PAS
Poignée Accelerateur
Com
PWM
6
+Vbat
Temperature
Affichage LCD Tableau de Bord
vitesse, % assistance, jauge energie, temp
Capteur Poignée Frein
Figure2‐1:schémablocd’unsystèmed’assistanceaupédalaged’unVAE
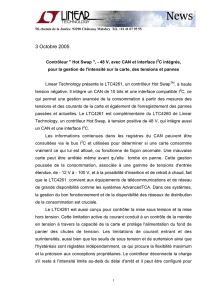
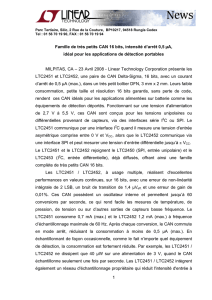
Figure2‐2:localisationdesélémentsconstitutifsd’uneassistanceélectriquesurunVAE

Labor
P.LAURENTPage203/11/2011
InstitutUniversitaire
DeTechnologie
Nice–Côted’Azur
2.2. Elémentsconstitutifsd’unkitd'assistanceélectrique
• CapteurdepédalagePAS:
Lalégislationeuropéenneimposequel’assistanceélectriqueduvélone
puisseêtredéclenchéequesil’utilisateurfaitlui‐mêmeuneffortdepédalage
(ceciafindenepasconsidérerleVAEcommeuncyclomoteur).En
supplément,touteassistancedoitêtrecoupéeaudelàde25Km/H.
Ainsi,laplupartdutemps,lacadencederotationdupédalierestmesurée
parunerouemobilequiestfixéesurl’axetournantdupédalieretdotéede
plusieurspetitsaimants.Montéfixesurlepédalier,uncapteurdepédalage
dotéde2capteursmagnétiques(àeffethallengénéral)mesurelacadence
depassagedesaimantsfixéssurlarouemobile.
Lerésultatdecettemesureestunetensionanalogiquevariableentre0.8V
(lorsquelavitessedepédalageestfaible)et4.2V(àcadencemaximalede
2tr/s).Legainestenmoyennede2V/tr/s
Silutilisateurcessedepédalerousiilpédaleenarrière,latensiondu
capteurPAStombeimmédiatementà0V.Lassistances’arrête.
• Capteurdepoignéedefrein:
Ils’agitd’unepoignéedefreinclassiquedotéed’uncontacteurélectrique
(ToR).Cetteinformationbooléennelogiqueinformelecalculateurd’un
freinageetdoncstoppeimmédiatementtoutealimentationenénergiedu
moteur.
Certainscalculateurspeuventinterprétercetteinformationpourenclencher
unephasedefreinagerécupératriceetdoncrechargerlesbatteries.
LeproblèmeestquelesbatteriesLithiumsupportentassezmallesphasesde
microrechargesetcomptetenudelafaibleénergiecinétiqued’unvélo(poids
etvitesse)laplupartdescalculateursdumarchénerécupèrentpaslénergie
aufreinage.
• Contrôleur/Calculateur:
C’estluiquiconstitueàlafoislecerveau(calculateur)etl’organede
conversiondénergie(convertisseurdepuissance)entrelabatterieetle
moteurdassistance.
Onyretrouvel’ensembledelaconnectique(batterie,moteur,capteurs)
etilestconstituéd’unmicrocontrôleurbonmarchéassociéàunhacheur
(moteurDC)ouunonduleurtriphasédepuissanceàtransistors(moteur
brushlesstriphasés)LalimentationDCbatteriesefaitentre24Vet48V.
• LemoteurRoue:
C'estl'organedeconversionélectromécaniquedelachainede
puissance.Cemoteurremplacelaroued’origineetest
généralementdetechnologieàcourantcontinu(DC)oucourant
alternatif(machinesynchroneàaimantspermanents.)
Pourlaversionsynchrone,ilpossède3phasesetestdotéde3
capteursàeffetshallpermettantdedéterminerlapositiondurotor.
Lesaimantssontsituéssurlapériphériedumoteur(inducteur)et
tournentaveclaroue.Lesbobinages(induit)sontsituesaucentre
dumoteuretsontfixesparrapportàlafourche.(Sortedemachine
synchroneinversée)
Ilyaengénéralde10à20pairesdepôles(p)danscetypede
machines(machineàrotationlentedoncfortementmultipolaires).

Labor
P.LAURENTPage303/11/2011
InstitutUniversitaire
DeTechnologie
Nice–Côted’Azur
Lafréquencedessignauxélectriqueobservéesàlinduitestégaleàp*vitessederotationmécaniquedumoteur.
Lapuissancedumoteurdoitêtrelégalementlimitéeà250W(réglementationeuropéenne).Desversionsoffroad
sontproposéesen48V1Kw!!!!(1.5Chsurunvélode15kg……)
• Labatterie:
Labatterieestl’élémentlepluscouteuxdecesystème.
Elleestfixéeengénéraleaucadreousurleportebagageduvélo
surunsupportamovible(pourrechargerdanssonappartement).
Lestensionsbatteriesontengénéralde36Vou48V(pourdes
raisonsdesécuritéetd’isolementélectrique).
Lescapacitésbatterievontde8Ahà20Ah.
Deuxtechnologiessontproposées.
Batteriesauplomb,économiquesmaislourdesetayantunefaible
capacitémassique.Onlesretrouvesurlesmodèlesbasdegamme
dufaitdeleurpoidsélevé.
Desbatteriesaulithium(LiOnouLiPoFe)pluslégèresetdotées
d’unefortecapacitémassique.
Lesprixsonttrèsélevés;exempleunebatterie36V/10AhLiPoFe
(360Wh)couteaujourd'hui600€TTC
PourunebatterieLiPoFede48V/10Ah(480Wh)lecoutsélèveà900€TTC!!!Avecunetellebatterieonpeutespérer
60Kmdautonomieenvironenconditionsnormales.
2.3. ImplantationetchoixdumoteurpourleVae.
Deuxtypesd’implantationdemoteurssontpossibles
• Enkitousecondemonte,lesmoteurssontgénéralementimplantésdanslaroueavantouarrièrecommesur
lafig.2.2.cestlemontageleplusrépanduactuellementcarilnenécessitepasdefabricationspécialedu
vélo.
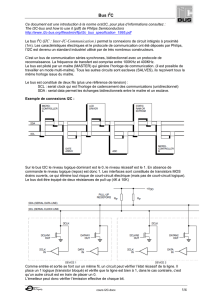
• Enmontaged’origine,lemoteurpeutêtredirectementimplantésurl’axedupédalier
Figure2‐3:exempledeVAEavecmoteurd’assistanceimplantésurl’axedupédalierousurlarouearrière
Danslecadredenotreprojet,noustravailleronssurlecasd’unmoteurroueimplantésurlaroueavant(pourle
projetVAE)oudanslarouearrière(pourleprojetscooterélectrique).
Lesdeuxtypesdemotorisationquicoexistentactuellementsontlessuivantes:

Labor
P.LAURENTPage403/11/2011
InstitutUniversitaire
DeTechnologie
Nice–Côted’Azur
• MoteurDCbrushàaimantspermanentMCC.
LeplusancienetleplussimpleétantlemoteuracourantcontinuDCavec
collecteuretbalais.
Avantages:Ilal’avantaged’êtresimpledecommande(latensiond’induit
déterminesavitessederotation)etuncollecteurmécaniqueintégréaurotor
(induit)dumoteurpermetdorientermécaniquementlefluxd’induitdurotor
aveclefluxd’inducteur(stator)pourmaximiserlecouple.Unsimplehacheur
1oudeuxquadrantssuffisaitàlepiloter.
Inconvénients:lecollecteurmécaniqueetsesbalais(charbons)s’usentet
cohabitentmalavecunmilieuextérieursévère(humidité)auquelestsoumis
levélo.Pourcetteraisondefragilitéauniveauducollecteur,lemoteurDC
estenvoied’abandon.
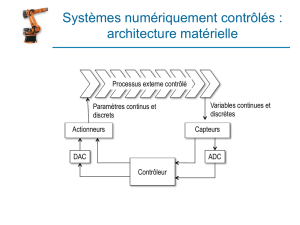
• MoteurDCbrushlessautopiloté.
C’est,àlabase,unmoteurtriphaséalternatifdotéaurotord’uninducteuràaimantspermanents.Lidéeestde
considérerque,vudel’extérieur,ilsecomporteracommeunmoteuràcourantcontinumaisnonpasdotéd’un
collecteurmécanique(commelemoteurDC)maisplutôtd’uncollecteurélectronique(réaliséavecdestransistors
mosfetouigbt).
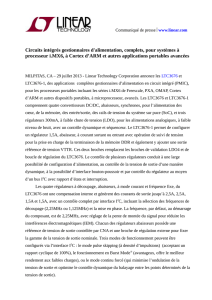
Figure2‐4:structuresdeconvertisseursdénergiespossiblesenfonctiondelamachineutilisée
DansuneMCC,larotationmécaniquedurotordumoteurDC(MCC)assurelaparfaitealimentationdes
enroulementsdel’induitdurotordemanièreàcréerunchampd’induitperpendiculaireauchampsd’inducteur.
DanslemoteurBrushless(MS)larotationdurotor(inducteuràaimants)estmesuréeparunoudescapteursde
position,etondétermineainsiquellephase(parmiles3)seraalimentéeàuninstantdonné.Cettelogiquede
commandeestappeléeun«autopilotage».
Enfindanslesdeuxcas,unconvertisseurstatiqued’énergie(hacheurpourlaMCCouonduleurpourleBrushless)
permetderéglerlaquantitéd’énergieélectriquequiserainjectéedanslamachine.
Vuedelasourced’alimentationcontinu(Udc)toutsepassedanslesdeuxcascommesionavaitàfaireàune
machineacourantcontinue(onparlealorsMachineDCsansBalaisÙBrushlessDCMotor.).
Aujourdhui95%desmoteursemployéssontdesmachinesbrushlesstriphasées(pourdesquestionsderobustesse)
cequifaitquenotreétudeselimiterauniquementàcetypedemoteursassociésàdesonduleurstriphasés.

Labor
P.LAURENTPage503/11/2011
InstitutUniversitaire
DeTechnologie
Nice–Côted’Azur
2.4. Méthoded’alimentationsimplifiéedelaMachineSynchrone:Commanded’alimentationtrapèze120°
Solutionclassiquedelacommandesinusoïdale.
Normalement,pourcréeruncouplemoteurdansunemachinesynchronedontlesFEMsontsinusoïdalesilfaut
injecterdanschaquephaseuncourantlui‐mêmesinusoïdaletquisoitrigoureusementenphaseaveclafeminterne
/phasepourobtenirunepuissanceactivemaximalesansprésencedepuissanceréactive.
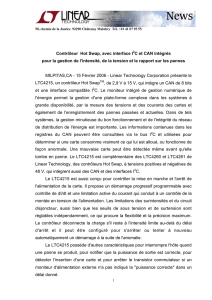
Figure2‐5:schémaclassiqued’alimentationencourantssinusoïdauxtriphasésd’unemachinesynchrone.
L’onduleurprésentésurlafigure2.5estconstituéde3brasdepontcomposéschacunde2interrupteurssilicium
commandésàl’ouvertureouàlafermetureetréversiblesencourant.
Enrégimepermanent,pouravoiruncourantsinusoïdal,latensionissuedelabatterie(U)doitdécoupéeetmodulée
sinusoïdalement,carlaf.é.m.dumoteurestsinusoïdale.Laformedescourantsfournisparl’onduleurestenfait,
asservieàuneconsignesinusoïdaleliéedelapositioninstantanéedumoteur.
Chaquebraspeutêtrecommandédemanièrecomplémentaire:lorsqueKestbloquéK’conduitetvice‐versa,KetK’
nesontjamaisconducteurssimultanément(sinoncourtcircuitsurlebuscontinuU).
Lavariationsinusoïdaledurapportcycliqued’unbrasd’onduleurpermetd’obtenirunetensionàvaleurmoyenne
glissante(àl’échelledelapériodededécoupage)sinusoïdale.
Figure2‐6:principedelamodulationsinusoïdaleetcommandedesinterrupteursdelonduleur.
Onpeutsimaginerlachosesuivantepouressayerdecomprendrel’échanged’énergieentrelabatterieetlemoteur.
Silestensionsfabriquéesparl’onduleurtriphasésontrigoureusementenphaseaveclesFEMinternesdumoteuret
d’amplitudeégalesàlaFEMinterne,aucuncourantn’estéchangéentreleconvertisseuretlamachine.Doncpas
d’échanged'énergie(lemoteurtourneàvidesansfrottement).
Sionpilotel’onduleurpourfournirdestensionsàvideslégèrementsupérieuresenamplitudesauxFEMinternesdu
moteur,alorsdelapuissanceactiveseraabsorbéeparlemoteuretsetraduirapasuncouplemécaniquemoteur.
Cettepuissanceélectriqueestfournieàpartirbuscontinu(U)(généréparlabatterie)etconvertieparl’onduleur.
Siaucontrairelatensiondélivréeparl’onduleurestlégèrementinférieureàlaFEMinternedumoteuralorsdela
puissanceactiveestfournieparlemoteurànotreonduleur(ilmarchealorsenredresseurMLI).Cettepuissanceest
prélevéesurlecotémécanique.Lemoteuragitcommeunfreinetl’énergiemécaniqueestconvertieenénergie
électriquerécupéréepuisrenvoyéeverslesbatteries(U).Onparled’unfreinagerécupératif.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%